Team USRG@KAIST - the Winner of AI Grand Challenge 2020, South Korea-299+140
News Flash!!
- We won 2nd place at MBZIRC 2024 with Prof. Jinwhan Kim at ME!! The Prize is 0.5Million USD

- Prof. Shim appeared on EBS and YTN Interview Programs
- We won 2nd place at Hyundai Autonomous Challenge 2023!!
- We won Technology Innovation Award from ROK Army Dronebot Challenge!!
- Our joint research on humanoid pilot robot (PIBOT) is covered by national major news media
- Our journey continues at the historic Monza track!! Watch our Indy Car zipping through the track!!
- We won the 1st place of 2021 Hyundai Motor Challenge!!. 2021년 현대자율주행챌린지에서 우승했습니다!!
우리 무인시스템 연구실은 딥러닝, 항법, 제어기술을 융합한 드론, 자율주행차, 지상로봇과 같은 지능형 로봇을 연구합니다.
우리 연구실은 2020년 과기부 인공지능 챌린지에서 우승한 드론기술을 발전시켜
in-house 3D LiDAR SLAM을 개발해서 미국 NASA JPL 연구진과 협력하여 2021년 9월 DARPA Subterranean Challenge에도 참여하고 자율탐사 지상로봇 개발에도 성공하였습니다.
2021년 미국 Indy Autonomous Challenge에도 현대자동차와의 스폰서쉽 체결결을 통해 자율주행기술의 고도화에도 노력하고 있습니다.
우리 연구실은 real world에서 실제로 동작하는 로봇을 개발합니다. Real World Engineering에 관심있는 학생들을 환영합니다.
Welcome to our homepage. We are performing active research and development of highly advanced
autonomous vehicles by combining various principles of control theory, robotics, and artificial intelligence.
Our effort hopefully will lead to the development of unprecedented groups of intelligent vehicles in near future.
Professor

"David" Hyunchul Shim 심현철 교수
카이스트 전기및전자공학부 정교수
AI 대학원(-22.8), (현)로봇학제, (현)미래자동차 학제 겸임교수
KI 로보틱스 연구소장('19.8~'22.8)
KAIST 미래모빌리티 중점연구소장('21~'22)
국토부지원 민간무인기안전운항연구단장('16-'21)
지능형 무인기 특화연구실장('16-'20)
Professor, School of Electrical Engineering, KAIST
AI Graduate School(ended), Robotics, Future Vehicle Program Professor
Former Director, KI Robotics Institute, KAIST Future Mobility Research Institute
Former Director, Korea Civil RPAS Research Center supportef by MOLIT, Korean Government
Former Director, Intelligent UAV Research Laboratry
Google Scholar H-index 44, cited ~8,000 times (as of Jun. 2025)
Education
Doctor of Philosophy, December 2000, University of California, Berkeley(2000)
Master of Science in Engineering, February 1993, Seoul National University, Seoul, South Korea(1993)
Bachelor of Science in Engineering, February 1991. Seoul National University, Seoul, South Korea(1991)
Work Experiences
Professor, School of Electrical Engineering, KAIST, Daejeon, KAIST, South Korea, Mar. 2020 – present
Associate Professor, School of Electrical Engineering, KAIST, Daejeon, KAIST, South Korea, June 2018 – Feb. 2020
Associate Professor, Dept. of Aerospace Engineering, KAIST, Daejeon, KAIST, South Korea, Sep. 2010 – May 2018 (Tenured on 2014. 6)
Assistant Professor, Dept. of Aerospace Engineering, KAIST, Daejeon, KAIST, South Korea, Feb. 2007 – Sep. 2010
Project Manager, Principal Engineer, Berkeley Aerobot Research Team, UC Berkeley, Mar. 2005 – Feb. 2007
Staff servo engineer, Maxtor Corporation, Milpitas, California, June 2001 – Feb. 2005
Design Engineer, Hyundai Motor Company, South Korea - Jan 1993 – May 1994
Students
Students in Ph.D. Degree course
Students in Master's Degree course
Alumni
Ph.D Degree
-
김태진 (Hyundai Motors Group Robotics Lab) 2017~2024
< Development of a Mobile Robot System for Delivery in an Indoor Multi-Floor Environment >
-
김보성 (Samsung Electronics) 2019~2024
< Segmented Map-Based Topological Exploration with Adaptive LiDAR-Inertial Odometry >
-
이대규 (ETRI) 2020~2024
< Scaleable and Learnable Autonomous Driving System: Design and Field Evaluation >
-
류상규 (ADD) 2018~2023
< Sensor prediction of missile flight tests >
- 오현찬 (KETI) 2015~2023 < >
-
정찬영 (NASA JPL-Field AI) 2018~2022
< Towards fully autonomous racing : system design for the indy autonomous challenge and imitation learning approach using hierarchical policy abstractions >
-
이한섭 (ETRI) 2017~2021
< Development of an anti-drone system using a deep reinforcement learning algorithm >
-
정성구 (NASA JPL-Field AI) 2016~2020
< A Deep Reinforcement Learning based Motion Planner for the Exploration of Unknown Environments with an Aerial Robot >
-
이재현 (Cirrus-Hyundai Supernal) 2016~2020
< Detect-and-Avoid Technology Development and Flight Test for Unmanned Aircraft System Integration >
-
이다솔 (ADD) 2013~2019
< (A) Scalable Path Planning Algorithm for Drone Swarms using Density Control >
-
신희민 (KARI) 2013~2018
< Design of an Aerial Combat Algorithm Based on Basic Fighter Maneuvers and Reinforcement Learning >
-
이장호 (KARI) Fall 2013~2017
< Research on the actuator fault tolerant adaptive control scheme to enhance safety of multicopter>
-
조성욱 (청주대학교) 2012~2017
< Research on the Image-based Visual Servoing Framework Considering the Aerial Manipulation >
-
이웅희 (NAVER LABS) 2011~2017
<Development of urban self-driving vehicle using lane detection on the road and localization in intersection with lane map>
-
양희돈 (Korea Polytechnics) 2008~2015
-
-
정연득 (KARI) 2010~2014
< A Multimodal Flight Control Design and Flight Test of a Tail-sitter UAV >
-
유동일 (ADD) 2010~2014
< Design of an Aerial Combat Guidance Law using Virtual Pursuit Point Concept >
-
허성식 (KARI) 2009~2014
< Vision and LIDAR-based Autonomous Navigation System for Indoor and Outdoor Flight of Unmanned Aerial Vehicles >
-
윤상열 (LG Electronics) Spring 2011~2013
< Research on the UAV Model Based Design and Adaptive Control for Uncertain Dynamics >
-
최형식 (KARI) Fall 2007~2011
< Research on the UAV Model Based Design and Adaptive Control for Uncertain Dynamics >
Master's Degree
- 김지혁 2023~2025
- 한동훈 (Ph.D. Course) 2023~2025
- 노주형 (Ph.D. Course) 2023~2025
- 김도경 (LIG Nex1) 2023~2025
- 류찬회 2022~2024
- 남현우 (Hyundai Motors Group) 2022~2024
- 문성우 (Ph.D. Course) 2022~2024
- 나성원 (Ph.D. Course) 2022~2024
- 박재용 (LIG Nex1) 2022 ~ 2024
- Andrea Finazzi (TII(Technology Innovation Institute), Abu Dhabi) 2020~2022
- 한승일 (Hyundai Motors Group) 2020~2022
- 강규리 (Ph.D Course) 2020~2022
- 유재웅 (KETI) 2020~2022
- Jedsadakorn Yonchorhor(Siam Commercial Bank) 2019~2021
- 김동휘 (KAI) 2019~2021
- 한동희 (라이드 플럭스) 2019~2021
- 김현지 (Samsung Electronics) 2019~2021
- 류현지 (Hyundai Motors Group) 2019~2021
- 성현기 (Ph.D Course) 2019~2021
- 이승현 (대한민국 육군) 2019~2021
- 이승욱 (Ph.D Course) 2018~2020
- 김태연 2018~2020
- 이대규 (Ph.D Course) 2018~2020
- 위인환 (KI Robotics) 2018~2020
- 황선유 (TU Delft, Ph.D. Course) 2016~2018
- 홍준 (MORAI) 2015~2017
- 정찬영 (Ph.D Course) 2016~2017
- 강재민 (Timax Soft) 2016~2017
- 김현기 (KAI) 2016~2017
- 정석우 (LG Electronics) 2015~2017
- 이한섭 (Ph. D Course) 2015~2016
- 유하람 (Timax Soft) 2015~2016
- 박성연(LG Electronics) 2014~2015
- 송한준(Intuitive Robots) 2014~2015
- 이석주 (Ph.D Course) 2013~2015
- 이다솔 (Ph.D Course) 2013~2014
- 김정운 (ADD) 2011~2012
- 정지원 (Ph.D Course) 2012~2013
- 신희민 (Ph.D Alumni) 2011~2012
- 이상협 (Hyundai Motors Group) 2011~2012
- 조성욱 (Ph.D Alumni) 2010~2011
- 오은미 (KARI) 2010~2011
- 문상우 (공군사관학교 교수요원)
- 정연득 (Ph.D Alumni) 2008~2009
- 유동일 (Ph.D Alumni) 2008~2009
- 허성식 (Ph.D Alumni) 2007~2008
News
 Media
Media- (2024.01) 심현철 교수, IROS 2024 Organization Committee 활동
- (2024.01) Team USRG Indy Autonomous Challenge at CES2024 참가
- (2024.01) 심현철 교수, EBS 초대석 출연
- (2023.12) 심현철 교수, 호암재단 초청 강연
- (2023.11) Team USRG, 현대 자율주행 챌린지 참가 (2위)
- (2023.11) USRG 연구실, 민대한민국 과학기술대전 전시 참가 (조종사 로봇)
- (2023.10) ADEX2023 조종사 로봇 Pibot 전시
- (2023.08) 심현철 교수 YTN 브라보 K-사이언티스트 출연
- (2023.07) 심현철 교수 서울미래컨퍼런스 초청 토크
- (2023.06) Team USRG Indy Autonomous Challenge at Monza (MIMO2023) 참가
- (2023.02) Team USRG 현대자동차(주) 고속 자율주행기술 개발 파트너쉽 체결
- (2023.01) Team USRG Indy Autonomous Challenge at CES2023 참가
- (2022.11) Team USRG Indy Autonomous Challenge at Texas Motor Speedway 참가
- (2022.08) USRG 연구실 N1 314호로 이전
- (2022.05) 심현철 교수, 한국 로봇학회 초청강연
- (2022.02) USRG 연구실 부산 드론Expo 참가 독립부스 개설
- (2022.02) 심현철 교수, KAIST 국제협력상 수상
- (2022.01) Team USRG Indy Autonomous Challenge at CES2022 참가
- (2021.12) 심현철 교수, 과기정통부 장관 표창 (인공지능챌린지 발전 공로)
- (2021.11) 이대규, 성현기, 한승일, 강규리, 심현철 교수(KI-Robotics팀), 2021 현대자동차그룹 자율주행 챌린지 우승, 서울특별시장 표창, 상금 1억, 미국 해외 견학
- (2021.10) 미국 Indy Autnomous Challenge at Indianapolis Motorspeedway 참가
- (2021.09) DARPA Subterranean Challenge Phase 3 Team CoSTAR 참가 (NASA JPL, CalTech, MIT) 본선 9월 23일
- (2021.07) 심현철 교수 카이스트 미래 모빌리티 중점연구소 착수
- (2021.03) 이대규, 정찬영, 성현기, 한승일, 강규리, 심현철 교수(KI-Robotics팀), 2021 현대자동차그룹 자율주행 챌린지 본선 진출
- (2020.11) 이한섭, 김보성, 심현철 교수, 2020 인공지능 그랜드 챌린지 제어지능부문 2년 연속 우승, 과기정통부 장관상, 연구비 12억원 지원
- (2020.09) 심현철 교수, AI 대학원 겸임 발령
- (2020.07) 심현철 교수, 한국과학기술원 49주년 개교기념식에서 연구대상 수상
- (2020.02) 심현철 교수, 정교수 발령
- (2019.12) Lockheed Martin AlphaPilot 3위 수상
- (2019.12) Microsoft주최 NIPS "Game of Drone" 2위 수상
- (2019.07) 정성구, 이한섭, 위인환, 심현철 교수 2019 인공지능 그랜드 챌린지 제어지능부분 우승, 과기정통부 장관상, 연구비 12억원 지원
- (2019.09) 정성구, 이한섭, 심현철 교수, 2019 대전 드론첼린지 대회 드론미로찾기 금상
- (2019.07) 이한섭, 정성구, 위인환, 김태연, 이응창, 심현철 교수, 2019 인공지능 그랜드 챌린지 제어지능부문 우승
- (2019.07) 정찬영, 김태진, 오현찬, 이대규, 이승욱, 성현기, 김현지, 류현지, 한동희, 이승현, 심현철 교수, 2019 현대자동차 자율주행자동차 경진대회 3위
- (2018.12) 심현철 교수, 정찬영, 자율주행국민체감행사에서 국토교통부장관표창 수상
- (2016.12) 유하람, 홍준,이웅희,정지원,정석우,정찬영,도종용,심현철, 2016 창조경제박람회 미래성장동력 챌린지퍼레이드 우수상(미래창조과학부 장관상) 수상
- (2016.11) 신희민, 이재현, 김현기, 심현철 교수, 2016 제 14회 KAI 항공우주논문상 공모전 대상-산업부장관상 및 특별상 수상
- (2016.10) 심현철 교수, 정성구, 이한섭, 조성욱, 이다솔, 신희민, 이재현, 김현기, 강재민, "IROS 2016 Autonomous Drone Racing Competition" 1위
- (2016.10) 심현철 교수 IROS 2016 Special Forum 세션에서 "From Theory to Policy:the case of Unmanned Aerial Vehicles"의 제목으로 Key Note speech
- (2016.4) 심현철 교수, 드론·AI 삼매경에 빠진 삼성 사장단을 대상으로 '민간 무인기의 정책, 산업 동향 및 핵심 기술'을 주제로 특강
- (2015.12) 심현철 교수, 과제명 : 무인항공기 안전운항기술 개발 및 통합 시범운용, 총 예산 176억 규모의 국토교통기술연구(항공안전기술개발사업)과제를 주관연구책임자로서 수주
- (2015.12) 심현철, 이웅희, 정지원, 오현찬, 유하람, 정석우, 홍준, 2015년도 창조경제박람회 『미래성장동력 챌린지 퍼레이드』에 참가하여 우수상(미래창조과학부장관상) 수상
- (2015.10) 심현철 교수,< 국방 특화 연구실 "지능 기반 무인기 제어"> 총 예산 21억 규모 과제 주관연구책임자로서 수주
- (2015.6) 박성연, 제6회 창의메이커스데이 드론재난구호 경진대회 우수상 수상
- (2015.4) 박성연, 허성식, 이다솔, 심현철, "지상,공중 복합임무를 위한 형태변환 무인 하이브리드 이동체의 개발", 한국항공우주학회 2015년도 춘계학술대회 우수논문발표상 수상(2014년도 추계학술대회 발표 논문)
- (2015.3) 심현철 교수, 과제명 : 고신뢰성 다종 무인이동체 통신 및 보안 SW기술 개발, 참여기관 총 예산 27억 규모의 미래창조과학부 과제 참여기관 책임자로서 수주
- (2014.10) 제 12회 미래자동차 기술공모전 자율주행자동차 경진대회에 참가하여 열정상 수상
- (2014.9) 이웅희 박사과정, 미국 National Instrument Global Student Design Competition (GSDC)에 Finalist로 선정
- (2014.8) 허성식(KARI) 박사, 유동일(ADD) 박사, 정연득(KARI) 박사 졸업
- (2014.6) 심현철 교수, 테뉴어 심사 통과
- (2014.4) 무인자동차와 무인기를 이용한 딸기 배달 시연. KBS, MBC, YTN, EBS, 채널A, JTBC 등 여러 방송국에서 집중 조명하여 취재
- (2014.2) 윤상열 박사 졸업
- (2013.10) 유동일, 심현철, "무인전투기를 위한 가상 추적점 기반 자율 공중 교전 유도 법칙에 관한 연구", 2013 제 11회 KAI 항공우주논문상 공모전 KAI 사장상(최우수상) 수상
- (2013.5) 이웅희, 심현철, "자율 주행 차량을 위한 3차 방정식을 이용한 경로 추종과 장애물 회피 경로 생성", 2013 한국 자동차공학회 부문종합 학술대회 우수발표 논문상 수상
- (2013.4) 유동일, 심현철, "무인전투기의 자율 근접 공중 교전을 위한 가상 추적점 기반 전술 기동 유도 법칙 설계", 2013 국제 무인항공기 논문상 공모전 한국항공우주학회장상 수상
- (2012.12) 심현철 교수, 2012년 KAIST 기술혁신 우수상 수상
- (2012.9) Prof. Shim now serves as the Director of KAIST Field Robotics Research Center since Aug. 2012.
- (2012.9.21) 제 11회 미래자동차 기술공모전 자율주행자동차 경진대회에 참가하여 열정상 수상
- (2011.5) 최형식(KARI)박사 졸업
- (2011.2) Greeting event for the New coming students for Control Field Lab.
- (2011.2) 2011 KAIST Commencement
- (2010.9) Prof. David Hyunchul Shim was promoted to an associate prof. from an assistant prof.
- (2010.7.6) KAIST 무인자동차연구에 관한 내용이 YTN Science TV( http://www.sciencetv.kr ) 에서 방영하는 " 보물섬 " 이라는 코너에 " 차세대 자동차 " 라는 주제로 집중 보도
- (2010.6.7) 현대 / 기아자동차가 주관하는 " 미래자동차 기술공모전 " 을 위해 개발되어지고 있는 KAIST 무인자동차연구에 관한 심현철 교수 인터뷰 내용이 대덕넷 ( http://www.hellodd.com ) 에 기사화
- (2009.9) Presidential Award in Freshman Design Class "Library Assistance Robot" / KAIST (here)
- (2009.10.23) 제 7 회 KAI 항공우주논문상 대상 D. I. You and D. H. Shim, "Development of Micro Aerial Vehicle Systems and Autonomous Formation Flight of Multi-MAVs 한국항공우주산업 ( 주 )/ 항공우주학회 / 지식경제부
- (2008.3.27) An in-depth coverage of our effort to create a long-range, long-endurance UAV using cutting-edge UAV is broadcast on YTN Science TV. (The clip is here)
- (2007.10.9) Development of UAV powered by liquid fuel cell was covered by mainstream Korean media including KBS, MBC, YTN, Jongang, Donga, and so on.... (a clip is available here)
- (2007.10.6) We continued our effort to win the grand prize of the Korean UAV competition, but our helicopter crashed right after take-off due to the severe shift of payload added in the last minute of the competition.
- (2007.9.15) Our team, BiK1, entered the Korean UAV competition and performed a perfect autonomous flight from take-off to
Awards
- 2024.09 KAIST-KRM 연합팀 육군 드론봇챌린지 최우수상
- 2024.02 UAE MBZIRC Maritime Challenge 2위 (카이스트 기계공학과 김진환 교수 연합팀)
- 2024.02 한국 로봇학회 우수논문상 2건 (김보성, 노주형 외)
- 2023.11 이대규, 나성원, 남현우, 문성우, 류찬회, 김도경, 노주형, 김지혁, 심현철 교수(EureCar-R팀), 2023 현대자동차 자율주행 챌린지 2등, 상금 3000만원, 싱가폴 해외 견학
- 2023.8김보성, 노주형, 김도경, 김지혁, 심현철, 건물내부정찰 종목 기술혁신상, 국방부장관배 드론봇 챌린지 대회, 2023
- 2023 KRoC 한국로봇종합 학술 대회 우수논문상 (김보성)
- 2022.12 인공지능 그랜드 챌린지 (AGC) 공로상 (KETI 연구원장상) -김보성, 이승욱
- 김보성, 이승욱, 박재용, Maulana Bisyir Azhari, Ozan Günes, 심현철, 건물 내부 정찰 종목 우수상, 제 5회 Army TIGER 드론봇 임무형 챌린지 대회, 2022
- 2022.02 심현철 교수, 카이스트 제 51주년 국제협력상
- 2021.11 이대규, 성현기, 한승일, 강규리, 심현철 교수, 2021 현대자동차 자율주행 챌린지 우승, 서울특별시장표창, 상금 1억, 미주해외견학
- 강규리, KAIST Institute Prototype Creator상, 2021
- 이대규, KAIST Institute 우수연구자상, 2021
- 이한섭, KAIST Institute 우수연구자상, 2020
- 이한섭, 김보성, 심현철 교수, 2020 인공지능 그랜드 챌린지 제어지능부문 2년 연속 우승, 과기정통부 장관상, 연구비 12억원 지원
- 심현철 교수 카이스트 개교 49주년 기념 연구대상 수상
- 이재현, KAIST Institute 우수연구자상, 2019
- Inhwan Wee, Taeyeon Kim, Eungchang Mason Lee, Dasol Lee, Sunggoo Jung, Hanseob Lee, and David Hyunchul Shim, 'Third Place - [AIRR] Alpha Pilot 2019', 2019 Dec.
- 이한섭, 정성구, 위인환, 이응창, 심현철 교수, 장관상, 2019 인공지능 그랜드 챌린지 제어지능부문 우승
- 정찬영, 김태진, 오현찬, 이대규, 이승욱, 성현기, 김현지, 류현지, 한동희, 이승현, 심현철 교수, 2019 대학생 자율주행자동차 경진대회 3위
- 심현철, 정찬영, "2018년도 국토교통기술대전 자율 주행 국민 체감 행사"에서 국토교통부장관 표창
- Sunggoo Jung, Hanseob Lee, Dasol Lee, Jaehyun Lee, Inhwan Wee, Taeyeon Kim, and David Hyunchul Shim, 'Second Place - IROS 2018 Autonomous Drone Racing Competition'
- Sunggoo Jung, Sunyou Hwang, Heemin Shin, Dasol Lee, Jaehyun Lee, Hanseob Lee, Jaemin Kang, Hyungi Kim, and David Hyunchul Shim, 'First Place - Airbus Autonomous Drone Racing Competition', 2017 Oct.
- 이한섭, 정성구, 이다솔, 심현철, "스테레오 영상기반 무인기를 이용한 비행 물체 포획 시스템 개발", 2017 한국로봇종합학술대회, 포스터 우수 논문상
- 정성구, 이한섭, 조성욱, 심현철, "영상기반 비주얼 서보잉을 통한 장애물 통과 기법", 2017 한국로봇종합학술대회, 국민안전로봇 프로젝트 부문 우수발표 논문상 수상
- 유하람, 홍준, 이웅희, 정지원, 정석우, 정찬영, 도종용, 심현철, 2016년도 창조경제박람회 『미래성장동력 챌린지 퍼레이드』에 참가하여 우수상(미래창조과학부장관상) 수상
- 신희민, 이재현, 김현기, 심현철, 2016 제14회 KAI 항공우주논문상 공모전 대상-산업부장관상 및 특별상 수상
- Sunggoo Jung, Hanseob Lee, Sungwook Cho, Dasol Lee, Heemin Shin, Jaehyun Lee, Hyungi Kim, Jaemin Kang, and David Hyunchul Shim, 'First Place - IROS 2016 Autonomous Drone Racing Competition'
- 심현철, 이웅희, 정지원, 오현찬, 유하람, 정석우, 홍준, 2015년도 창조경제박람회 『미래성장동력 챌린지 퍼레이드』에 참가하여 우수상(미래창조과학부장관상) 수상
- 박성연, 제6회 창의메이커스데이 드론재난구호 경진대회 우수상 수상
- 박성연, 허성식, 이다솔, 심현철, "지상,공중 복합임무를 위한 형태변환 무인 하이브리드 이동체의 개발", 한국항공우주학회 2015년도 춘계학술대회 우수논문발표상 수상(2014년도 추계학술대회 발표 논문)
- Unghui Lee, Jiwon Oh, Seunghak Shin, Inwook Shim, Jongwon Choi, Youngseop Jung, Kibaek Park, Minhyun Kim, Jiwon jung, Hyunchul Shim, Inso Kweon, and Seibum Choi, "NI Engineering Impact Awards Finalist - EureCar: KAIST Self-Driving Car", 2014 Aug.
- 학생 우수발표 논문상 수상 (이다솔, 심현철, "횡방향 가속도 제한을 고려한 고정익 무인항공기의 Spline-RRT* 기반 최적 경로계획", 2014년도 제어로봇시스템학회 학술대회)
- 허성식, 조성욱, 심현철, "저가형 LiDAR를 장착한 쿼드로터의 3차원 실내 항법 및 자동비행," 제9회 한국로봇종합학술대회 우수논문상, 2014년 6월 20일
- 유동일, 심현철, "무인전투기를 위한 가상 추적점 기반 자율 공중 교전 유도 법칙에 관한 연구", 2013 제11회 KAI 항공우주논문상 공모전 KAI 사장상(최우수상) 수상
- 이웅희, 심현철, "자율 주행 차량을 위한 3차 방정식을 이용한 경로 추종과 장애물 회피 경로 생성", 2013 한국자동차공학회 부문종합 학술대회, 우수발표 논문상 수상
- 유동일, 심현철, "무인전투기의 자율근접 공중교전을위한 가상추적점기반전술기동 유도법칙설계", 2013 국제 무인항공기 논문상 공모전, 한국항공우주학회장상 수상
- 심현철, 2012년 KAIST 기술혁신 우수상 수상
- KAIST 유레카, 2012년 제11회 미래자동차 기술공모전 자율주행자동차 경진대회 열정상 수상
- KAIST 유레카, 2010년 제10회 미래자동차 기술공모전 자율주행자동차 경진대회 도전상 수상
- D. I. You and D. H. Shim, "Development of Micro Aerial Vehicle Systems and Autonomous Formation Flight of Multi-MAVs", 2009 제 7회 KAI 항공우주논문상 공모전 대상 수상
Publications
International Journals
- Sungjae Min, Gyuree Kang, Hyungjoo Kim, and D. Hyunchul Shim, "Toward Fully Automated Aviation, PIBOT: a Humanoid Robot Pilot for Human-Centric Aircraft Cockpits," IEEE Robotics & Automation Magazine (RAM), 2025.
- Hyunki Seong and David Hyunchul Shim, "TempFuser: Learning Tactical and Agile Flight Maneuvers in Aerial Dogfights using a Long Short-Term Temporal Fusion Transformer", IEEE Robotics and Automation Letters(RA-L), 2024.
- Gyuree Kang, Hyunki Seong, Daegyu Lee, and David Hyunchul Shim "A Versatile Door Opening System with Mobile Manipulator through Adaptive Position-Force Control and Reinforcement Learning." Robotics and Autonomous Systems, 2024.
- Taejin Kim, Gyuree Kang, Daegyu Lee, and D. Hyunchul Shim. "Development of an Indoor Delivery Mobile Robot for a Multi-Floor Environment." IEEE Access, 2024.
- Daegyu Lee*, Hyunki Seong*, Gyuree Kang, Seungil Han, D. Hyunchul Shim, Yoonjin Yoon. "Design, Field Evaluation, and Traffic Analysis of a Competitive Autonomous Driving Model in the a Congested Environment." IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2024. (*equally contributed)
- Daegyu Lee, Hyunwoo Nam, Chanhoe Ryu, Sungwon Nah, Seongwoo Moon and David Hyunchul Shim "Enhancing State Estimator for Autonomous Race Car: Leveraging Multi-modal System and Managing Computing Resources." IEEE Transactions on Intelligent Vehicles (T-IV), 2024.
- Boseong Kim, Maulana Bisyir Azhari, Jaeyong Park, and David Hyunchul Shim "An autonomous UAV system based on adaptive LiDAR inertial odometry for practical exploration in complex environments." Journal of Field Robotics, 2023.
- Daegyu Lee, Hyunwoo Nam, and David Hyunchul Shim "ELiOT: End-to-end Lidar Odometry using Transformer Framework.", arXiv preprint arXiv:2307.11998 (Under review.).
- Hyunki Seong, Chanyoung Chung, and David Hyunchul Shim "Model parameter identification via a hyperparameter optimization scheme for autonomous racing systems." IEEE Control Systems Letters (2023).
- Calvin Chanyoung Jung, Andrea Finazzi, Hyunki Seong, Daegyu Lee, Seungwook Lee, Bosung Kim, Gyuri Gang, Seungil Han, and David Hyunchul Shim "Autonomous System for Head-to-Head Race: Design, Implementation and Analysis; Team KAIST at the Indy Autonomous Challenge." IEEE Transactions on Field Robotics (2024).
- Sang-Gyu Ryu, Jae Jin Jeong and David Hyunchul Shim. "Sensor data prediction in missile flight tests." Sensors 22.23 (2022): 9410.
- Sangyol Yoon, Chanyoung Jung, and David Hyunchul Shim. "Shape-Aware and G2 Continuous Path Planning Based on Bidirectional Hybrid A∗ for Car-Like Vehicles." Journal of Intelligent & Robotic Systems 103.3 (2021): 1-14.
- Daegyu Lee, Gyuree Kang, Boseong Kim, and D. Hyunchul Shim. "Assistive Delivery Robot Application for Real-World Postal Services," in IEEE Access, vol. 9, pp. 141981-141998, 2021, doi: 10.1109/ACCESS.2021.3120618.
- Daegyu Lee, Seungwook Lee, Zheng Chen, B. Brian Park, and David Hyunchul Shim. "Design and field evaluation of cooperative adaptive cruise control with unconnected vehicle in the loop". Transportation Research Part C: Emerging Technologies 132 (2021): 103364.
- Sung Won Cho, Hyun Ji Park, Hanseob Lee, David Hyunchul Shim, and Sun-Young Kim. "Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations." Computers & Industrial Engineering 161 (2021): 107612.
- Sunggoo Jung, Hanseob Lee, David Hyunchul Shim, and Ali‐akbar Agha‐mohammadi. "Collision‐free local planner for unknown subterranean navigation." ETRI Journal 43, no. 4 (2021): 580-593.
- Chanyoung Jung, and David Hyunchul Shim. "Incorporating Multi-Context Into the Traversability Map for Urban Autonomous Driving Using Deep Inverse Reinforcement Learning." IEEE Robotics and Automation Letters 6.2 (2021): 1662-1669.
- Chanyoung Jung, Daegyu Lee, Seungwook Lee, David Hyunchul Shim, "V2X-Communication-Aided Autonomous Driving: System Design and Experimental Validation", Sensors, Volume 20, Issue 10, May, 2020
- Sungwook Cho, David Hyunchul Shim, "Sampling-based Visual Path Planning Framework for a Multirotor UAV", International Journal of Aeronautical and Space Sciences, Volume 20, Issue 3, pp 732~760, Sep, 2019
- Jaehyun Lee, David Hyunchul Shim, Sungwook Cho, Heemin Shin, Sunggoo Jung, Dasol Lee and Jaemin Kang, "A mission management system for complex aerial logistics by multiple unmanned aerial vehicles in MBZIRC 2017", Journal of Field Robotics, Jan, 2019
- Jun Hong, Seokwoo Jung, Chanyoung Jung, Jiwon Jung and David Hyunchul Shim, "A General-Purpose Task Execution Framework for Manipulation Mission of the 2017 Mohamed Bin Zayed International Robotics Challenge" Journal of Field Robotics: Special Issue on 2017 MBZIRC, Vol. 36, No. 1, pp 149-169, Jan, 2019
- Sungwook Cho and David Hyunchul Shim, "Visual servoing framework using Gaussian process for an aerial parallel manipulator", Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, Vol. 233, Issue 9, pp. 3408-3425, July, 2019
- Aditya A Paranjape, Soon-Jo Chung, Kyunam Kim and David Hyunchul Shim, "Robotic herding of a flock of birds using an unmanned aerial vehicle", IEEE Transactions on Robotics, Vol. 34, No. 4, pp 901-915, Aug 2018
- Dasol Lee, David Hyunchul Shim, "A Mini-drone Development, Genetic Vector Field-Based Multi-agent Path Planning, and Flight Tests", International Journal of Aeronautical and Space Sciences, pp 1-13, July 2018
- Sunggoo Jung, Sunyou Hwang, Heemin Shin, David Hyunchul Shim, "Perception, Guidance, and Navigation for Indoor Autonomous Drone Racing Using Deep Learning", IEEE Robotics and Automation Letters (RA-L / ICRA), Vol. 3, No. 3, pp 2539-2544, July 2018
- Heemin Shin, Jaehyun Lee, Hyungi Kim, David Hyunchul Shim, "An Autonomous Aerial Combat Framework for Two-on-Two Engagements Based on Basic Fighter Maneuvers", Aerospace Science and Technology, Vol 72, pages 305-315, Jan, 2018. (https://doi.org/10.1016/j.ast.2017.11.014)
- Sunggoo Jung, Sungwook Cho, Dasol Lee, Hanseob Lee and David Hyunchul Shim, "A Direct Visual Servoing-based Framework for the 2016 IROS Autonomous Drone Racing Challenge", Journal of Field Robotics: Special Issue on High Speed Vision-Based Autonomous UAVs, Vol. 35, No. 1, pp 146-166, Jan. 2018
- Dasol Lee, Hanseob Lee, Jaehyun Lee, David Hyunchul Shim, "Design, Implementation, and Flight Tests of a Feedback Linearization Controller for Multirotor UAVs", International Journal of Aeronautical and Space Sciences, Vol.18, No.4, pp740-756, Dec. 2017
- Sang Yol Yoon, Dasol Lee, Jiwon Jung, and David Hyunchul Shim, "Spline-Based RRT* Using Piecewise Continuous Collision-checking Algorithm for Car-Like Vehicles", Journal of Intelligent & Robotic Systems., Vol.90, No. 3-4, pp537-549, 25th, Sep., 2017.
- Unghui Lee, Jiwon Jung, Seokwoo Jung, David Hyunchul Shim, "Development of a Self-Driving Car that can Handle the Adverse Weather", International Journal of Automotive Technology, Vol.19, No.1, pp 191-197, 3rd, Oct., 2017.
- Jangho Lee, Eung-Tai Kim, Hyeok Ryu, David Hyunchul Shim, "Handling Quality Improvements of Fly-By-Wire Helicopter using Combined Model Following Controller with Decoupler", International Journal of Aeronautical and Space Sciences, Vol.18, No.2, pp 378-387, Feb. 2017
- Sungwook Cho, David Hyunchul Shim, "Development of a Vision-enabled Aerial Manipulator using a Parallel Robot", Trans. Japan Society for Aeronautical and Space Sciences Aerospace Tech. Japan (Online journal of TJSASS), paper of APISAT2016, Vol.15, No.APISAT-2016, p.a27-a36, Nov., 2016.
- Jangho Lee, Hyoung Sik Choi, David Hyunchul Shim, "Fault Tolerant Control of Hexacopter for Actuator Faults using Time Delay Control Method", International Journal of Aeronautical and Space Sciences, Vol. 17, No. 1, pp 54-63, Mar. 2016
- JeongWoon Kim, YeonDeuk Jung, Dasol Lee, David Hyunchul Shim, "Landing Control on a Mobile Platform for Multi-copters using an Omnidirectional Image Sensor", Journal of Intelligent & Robotic Systems, Vol.84, Issue.1, pp. 529-541, Dec. 2016
- S.Huh, S.Cho, Y.Jung and D.H.Shim, "Vision-based Sense-and-Avoid Framework for Unmanned Aerial Vehicles ", IEEE Tran. Aerospace and Electronic Systems (TAES), Vol. 51, No. 4, pp.3427-3439,Oct, 2015
- Sang Yol Yoon, Sung-Eui Yoon, Ung Hui Lee, David Hyunchul Shim, "Recursive Path Planning Using Reduced States for Car-like Vehicles on Grid Maps ", IEEE Transactions on Intelligent Transportation Systems, Vol. 16, No. 5, pp. 2797-2813, Oct, 2015
- Inwook Shim, Jongwon Choi, Seunghak Shin, Tae-Hyun Oh, Unghui Lee, Byungtae Ahn, Dong-Geol Choi, David Hyunchul Shim, and In So Kweon, "An Autonomous Driving System for Unknown Environments Using a Unified Map ", IEEE Transactions on Intelligent Transportation Systems, Vol. 16, Issue. 4, pp. 1999-2013, Aug, 2015.
- Hyoung Sik Choi, Sangjong Lee, Hyeok Ryu, Hyunchul Shim, and Cheolkeun Ha, "Dynamics and Simulation of the Effects of Wind on UAVs and Airborne Wind Measurement ", Trans. Japan Soc. Aero. Space Sci. Vol. 58, No. 4, pp. 187-192, Jul, 2015.
- Sangyol Yoon, David Hyunchul Shim, "SLPA*: Shape-aware Lifelong Planning A* for Differential Wheeled Vehicles ", IEEE Transactions on Intelligent Transportation Systems, Vol. 16, No. 2, pp. 730-740, Apr, 2015
- Dong-Il You and David Hyunchul Shim, "Design of an aerial combat guidance law using virtual pursuit point concept ", Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, Vol. 229, No. 5, pp. 792-813, Apr, 2015.
- Hyoung Sik Choi, Sangjong Lee, Jangho Lee, Hyeok Ryu, Hyunchul Shim, and Cheolkeun Ha, "Development of an Aircraft Auto-landing Guidance System using Time Delay Control, and Simulation with Crosswind and Aileron Fault ", Trans. Japan Soc. Aero. Space Sci. Vol. 58, No. 1, pp. 23-29, Jan, 2015.
- S.Cho, S.Huh and D.H.Shim, "Visual Detection and Servoing for Automated Docking of Unmanned Spacecraft ", Trans. Japan Society for Aeronautical and Space Sciences (TJSASS), Aerospace Tech. Japan, Vol. 12, No. APISAT-2013, pp. a107-a116, Dec., 2014.
- Byung Duk Song, Jonghoe Kim, Jeongwoon Kim, Hyorin Park, James R. Morrison and David Hyunchul Shim, "Persistent UAV service: An improved scheduling formulation and prototypes of system components ", Journal of Intelligent & Robotic Systems, Vol. 74, No. 1-2, pp. 221-232, Apr, 2014
- JeongWoon Kim, David Hyunchul Shim, James R. Morrison, "Tablet PC-based Visual Target-Following System for Quadrotors ", Journal of Intelligent & Robotic Systems, Vol. 74, Issue 1, pp. 85-95, Apr, 2014
- Heemin Shin, Dongil You, David Hyunchul Shim, "Autonomous Shipboard Landing Algorithm for Unmanned Helicopters in Crosswind ", Journal of Intelligent and Robotics System, Vol.74 Issue 1-4, pp.347-361, 15. April, 2014
- Sangwoo Moon, Eunmi Oh, and David Hyunchul Shim, "An Integral Framework of Task Assignment and Path Planning for Multiple Unmanned Aerial Vehicles in Dynamic Environments," Journal of Intelligent & Robotic Systems, Volume 70, Issue 1-4, pp 303-313, April 2013. (ISSN 0921-0296. DOI 10.1007/s10846-012-9740-3)
- Sungwook Cho, Sungsik Huh, David Hyunchul Shim, and Hyoung Sik Choi, "Vision-Based Detection and Tracking of Airborne Obstacles in a Cluttered Environment," Journal of Intelligent & Robotic Systems, Volume 69, Issue 1-4, pp 475-488, Jan. 2013. (ISSN 0921-0296. DOI 10.1007/s10846-012-9702-9)
- Yeunduk Jung, David Hyunchul Shim, "Development and Application of Controller for Transition Flight of Tail-Sitter UAV", Journal of Intelligent & Robotic Systems, Volume 65, Issue 1-4, pp 137-152, Jan. 2012. (ISSN 0921-0296. DOI 10.1007/s10846-011-9585-1)
- Hoam Chung, Songhwai Oh; Shim, D.H, Sastry, S.S, "Toward Robotic Sensor webs: Algorithms, Systems, and Experiments", Proceedings of IEEE , Volume 99-9, Page 1562-1586, Sep 2011
- Hyoung-Sik Choi and Hyunchul Shim, " Improvements on the Small-Scale Helicopter Rotor Modeling for Real-Time Simulation of Hovering Flight ," Transactions of the Japan Society for Aeronautical and Space Sciences, Vol. 54 No. 0, pp. 229-237, Nov. 2011
- Hyundong Oh, Dae-Yeon Won, Sung-Sik Huh, David Hyunchul Shim, Min-Jae Tahk, Antonios Tsourdos, "Indoor UAV Control Using Multi-Camera Visual Feedback. " Journal of Intelligent and Robotic Systems, Vol. 61, Issue 1-4, pp. 57-84, Mar, 2011
- H. S. Choi, S. J. Lee, J. H. Lee, E. T. Kim, and D.H.Shim, "Aircraft Longitudinal Auto-landing Guidance Law Using Time Delay Control Scheme," Transactions of JSASS Space Tech, Vol. 53, No. 181 p.207-214, 2010.
- D. I. You, D.H.Shim, "Autonomous Formation Flight Test of Multi-Micro aerial Vehicles," Journal of Intelligent and Robotic Systems, Vol. 61, Issue 1-4, pp. 321-337, Mar, 2011.
- H.D.Oh, D.Y.Won, S.Huh, D.H.Shim, and M.J.Tahk, "Experimental Framework for Controller Design of a Rotorcraft Unmanned aerial Vehicle Using Multi-Camera System," International Journal of Aeronautical & Space Sciences, Vol. 11, Issue 2, pp 69-79, June 2010.
- S. Huh, and D. H. Shim, "A Vision-Based Landing System for Small Unmanned Aerial Vehicles using an Airbag," Control Engineering Practice, Vol.18, Issue7, pages 812-823, July 2010
- S. Huh and D. H. Shim, "A Vision-based Automatic Landing Method for Fixed-wing UAVs, " Journal of Intelligent and Robotic Systems, Vol. 57, No. 1-4, pp.217-231, January, 2010.
- S. Moon, and D. H. Shim, "Study on Path Planning Algorithms for Unmanned Agricultural Helicopters in Complex Environment, " International journal of Aeronautical & Space Sciences, Vol. 10, No.2, November 2009
- D. H. Shim, J. S. Han, and H. T. Yeo, "A Development of Unmanned Helicopters for Industrial Applications," Journal of Intelligent and Robotic Systems, Vol. 54, No. 1-3, pp.407-421, March 2009.
- B. M. Min, S. S. Shin, H. C. Shim, M. J. Tahk, "Modeling and Autopilot Design of Blended Wing-Body UAV," KSAS International Journal, Vol. 9, No. 1, pp-121-128, May 2008.
- B. M. Min, M. J. Tahk, H. C. Shim, H. C. Bang, "Guidance Law for Vision-Based Automatic Landing of UAV," KSAS International Journal, Vol. 8, No. 1, pp.46-53, May 2007.
- D. H. Shim, H. Chung, S. Sastry, "Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles," IEEE Robotics and Automation Magazine, vol. 13, pp. 27-33, September 2006.
- D. H. Shim, H. S. Lee, and L. Guo, "Mixed-objective Optimization of Track-following Servo using Linear Matrix Inequalities," IEEE/ASME Transactions on Mechatronics, Vol. 9, No. 4, pp.636-643, Dec. 2004.
- D. H. Shim, and H. J. Kim, "A Flight Control System for Aerial Robots: Algorithms and Experiments," IFAC Control Engineering Practice, Vol. 11, No. 12, pp.1389-1400, Oct. 2003
- R. Vidal, O. Shakernia, H. J. Kim, H. Shim, S. Sastry, "Multi-Agent Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Transactions on Robotics and Automation, vol.18, no. 5, pages 662-669, October 2002.
Domestic Journals
- 노주형, 김보성, 김도경, 김지혁, 심현철. "다층 실내 환경에서 계단 극복이 가능한 궤도형 로봇의 신뢰성 있는 자율 주행 정찰 시스템," 한국로봇학회 논문지, 제 19권, 제 2호, pp. 149-158, 2024년 5월
- 김보성, 이승욱, 박재용, 심현철. "복합적인 실내 환경 내 신뢰성 있는 자율 비행을 위한 3 차원 장애물 지도 생성 및 경로 계획 알고리즘." 로봇학회 논문지, 18(3), 337-345.
- 박재용, 김보성, 이승욱, 심현철. "쿼드콥터의 곡률 기반 3 차원 경로 계획 알고리즘." 로봇학회 논문지, 18(3), 316-322.
- 이대규, 강규리, 김태진, 심현철, 정훈, 김은혜. "다층 환경에서의 라스트 마일 배송 서비스를 위한 경로 계획 및 엘리베이터 탑승 알고리즘." 로봇학회 논문지 18, no. 1 (2023): 10-17.
- 성현기,문성우,심현철,김우열,이택규, "비정형 환경의 모바일 로봇을 위한 보조 도착점 기반계층적 경로계획 프레임워크", 제어로봇시스템학회지, 제29권 제6호, 2023년 6월
- 강규리, 이대규,심현철, "실내 자율주행 로봇을 위한 3차원 다층 정밀 지도 구축 및 위치 추정 알고리즘" 로봇학회 논문지 17, no.1 (2022) : 025-031.
- 정찬영, 성현기, 심현철, "End to End 학습 기반 자율 주행 프레임워크 개발 및 실차 기반 실험", 제어로봇시스템학회지, 제26권 제5호, 2020년 5월
- 이다솔, 심현철, "쿼드로터 무인기를 위한 궤적 생성 및 추종 제어 시스템 개발", 제어로봇시스템학회지, 제25권 제5호, 2019년 5월
- 위인환, 이다솔, 김태연, 심현철, "130대 소형 쿼드로터의 실외 자율 군집비행을 위한 좌표계 확장 및 실험", 제어로봇시스템학회지, 제25권 제5호, pp.431 - 437, 2019년 5월
- 김태진, 오현찬, 심현철, "미니트램의 자율 주행을 위한 시스템 개발", 제어로봇시스템학회지, 제25권 제6호, pp.506-511, 2019년 6월
- 정찬영, 김태연, 심현철, "ROS 기반의 모바일 로봇 시스템 개발 및 실내 자율 주행 실험", 제어로봇시스템학회지, 제25권 제5호, pp.438 - 444, 2019년 5월
- 이다솔, 심현철, "최적 운반을 활용한 확률적 군집 경로 계획 알고리즘", 제어로봇시스템학회지, 제 24권, 9 호, pp.890-895, 2018년 9월
- 오현찬, 심현철, "로봇 항법과 SLAM 기술: SLAM 의 적용 및 활용 사례", 로봇과 인간 제 15권 2호, pp.26-30, 2018년 4월.
- 이다솔, 조성욱, 심현철, "소형 쿼드로터 플랫폼 개발 및 실외 자율 군집비행 실험", 제어로봇시스템학회지, 제 23권, 11호, pp.905-911, 2017년 11월
- 정지원, 심현철, "IT, 전자기업의 스마트카 개발 동향", 기계저널, 제57권, 제7호, pp.46-49, 2017년 7월
- 황선유, 이재현, 조성욱, 심현철, "소형 무인항공기의 충돌 회피를 위한 영상 기반 비행체 검출 기술 동향", 제어로봇시스템학회지, 제 23권, 3호, pp.25-31, 2017년 9월.
- 황선유, 조성욱, 심현철, "심층 합성곱 신경망 기반 의미론적 분할 모델을 이용한 영상기반 비행체 검출", 제어로봇시스템학회 논문지, 제23권, 제8호, pp.625-634, 2017년 8월.
- 이다솔, 심현철, "저가 하드웨어 기반 멀티로터 비행제어 컴퓨터 설계 및 검증", 항공우주학회지, 제45권, 5호, pp.401-408, 2017년 5월
- 정석우, 심현철, "자율주행 자동차의 인공지능", 기계저널, 제57권, 제3호, pp.42-45, 2017년 3월
- 조성욱, 심현철, "정밀 감시정찰을 위한 자동 군집화 기법 개발", 제어로봇시스템학회 국문저널, 제 23권, 2호, pp. 89-95, 2017년 2월
- 김상현, 최한림, 심현철, "능동 윤곽 기법을 적용한 단일 영상 기반 인공위성 상대항법 ", 한국항공우주학회지, 제43권, 제10호, pp.902-909, 2015년 10월.
- 조성욱, 이다솔, 정연득, 이웅희, 심현철, "물류수송을 위한 이종협업 무인 시스템 개발 ", 제어로봇시스템학회 논문지, 제20권,제4호,pp.27-36,2014년 12월.
- 조성욱, 정연득, 심현철, "물류수송을 위한 무인시스템 기술동향 (기술특집)", 제어로봇시스템학회지, 제 20권 4호, pp. 27-36, 2014년 12월.
- 이다솔, 심현철, "실제지형을 고려한 고정익 무인항공기의 최적 경로계획 ", 제어로봇시스템학회 논문지, 제20권, 제12호, pp. 1272-1277, 2014년 12월.
- 송한준, 이다솔, 심현철, "휴머노이드 로봇을 이용한 무인항공기 개발 ", 제어로봇시스템학회 논문지, 제20권, 제11호, pp.1112-1117, 2014년 12월.
- 정연득, 조성욱, 심현철, "L1 적응 제어 기법을 이용한 멀티로터 무인 항공기의 궤적 추종 기법 설계 ", 한국항공우주학회지 KCI 등재, 42(10), pp.842-850, 2014년 10월
- 허성식, 조성욱, 심현철, "저가형 LIDAR를 장착한 소형 무인항공기의 3차원 실내 항법 및 자동비행," 한국로봇학회논문지, 제9권, 제3호, pp.154-159, 2014년 9월.
- 유동일, 심현철, "무인전투기를 위한 가상 추적점 기반 자율 공중 교전 유도 법칙 설계," 한국항공우주학회지, 제42권, 3호, pp. 199-212, 2014년 3월
- 이웅희, 심현철, "무인자율주행경진대회와 무인자동차 기술발전," 로봇과 인간 제 10권 3호, pp.20-27, 2013년 8월.
- 문상우,오은미,유동일,심현철, "X-Plane 및 MATLAB/Simulink 기반의 복수무인기 모의실험 시스템 개발", 제어로봇시스템학회 논문지, 제19권, 제5호, pp. 442-449, 2013년 5월.
- 이웅희, 윤상열, 심인욱, 신승학, 최종원, 오지원, 심현철, 권인소, 최세범, "KAIST EureCar: 복잡한 도로 상황에서의 환경인식 및 충돌회피 가능한 무인자율주행차량 개발," 로봇과 인간 제 10권 2호, 2013년 4월.
- 유동일, 심현철, "비행체 운동 역학 기반 경로 추종 시선각 유도 법칙 설계", 한국항공우주학회지 제40권 6호, pp.506-514, 2012년 6월
- 조성욱, 허성식, 심현철, 최형식, "무인항공기의 근거리 비행체 탐지 및 추적을 위한 영상처리 알고리듬", 한국항공우주학회 제 39권 12호, pp.1115-1123, 2011년 12월
- 유동일, 심현철, "편대 유도 법칙 및 초소형 비행체의 자동 편대 비행 구현," 한국항공우주학회지 제 39권 2호, pp.121-127, 2011년 2월
- 원대연, 오현동, 허성식, 박봉균, 안종선, 심현철, 탁민제, " 멀티카메라를 이용한 영상정보 기반의 소형무인기 실내비행시험환경 연구, " 한국항공우주학회지 제37권 12호, pp.1209-1216, 2009.
- 심현철, 이은호, 이교일, " 모형 헬리콥터 정지비행제어에 관한 연구 (A Study on Hovering Flight Control for a Model Helicopter), " 대한기계학회 논문집 제18권 6호, pp.1399-1411, 1994.
International Conference Papers
- Seongwoo Moon, Hyunki Seong, Jehun Kang, Hojin Ahn and David Hyunchul Shim, "Pixel-to-Control: End-to-End Autonomous Driving via Spatio-Temporal BEV Architecture for Control Sequence Prediction", Accepted by 2025 Intelligent Transportation Systems Conference (ITSC).
- Chanhoe Ryu, Hyunki Seong, Daegyu Lee, Seongwoo Moon, Sungjae Min and David Hyunchul Shim "Words to Wheels: Vision-Based Autonomous Driving Understanding Human Language Instructions Using Foundation Models", 2025 IEEE Intelligent Vehicles Symposium (IV).
- Jihyeok Kim, Seongwoo Moon1, Sungwon Nah and David Hyunchul Shim "MonoDINO-DETR: Depth-Enhanced Monocular 3D Object Detection Using a Vision Foundation Model", 2025 IEEE Intelligent Vehicles Symposium (IV).
- Sungwon Nah, Seongwoo Moon, Hyunwoo Nam, Chanhoe Ryu, Dokyeong Kim, Jihyeok Kim and David Hyunchul Shim "Design and Validation of Autonomous Driving System for High Speed One-on-One Racing", 2025 IEEE Intelligent Vehicles Symposium (IV).
- Gyuree Kang, Ozan Günes, Seungwook Lee, Maulana Bisyir Azhari, and David Hyunchul Shim, "SPIBOT: A Drone-Ththered Mobile Gripper for Robust Aerial Object Retrieval in Dynamic Environments", 2025 International Conference on Robotics and Automation (ICRA).
- Hyungjoo Kim, Sungjae Min, Gyuree Gang, Jihyeok Kim and David Hyunchul Shim, "Fly by Book: How to Train a Humanoid Robot to Fly an Airplane Using Large Language Models", 2024 International Conference on Intelligent Robots and Systems (IROS).
- Hyunki Seong and David Hyunchul Shim, "Skill Q-Network: Learning Adaptive Skill Ensemble for Mapless Navigation in Unknown Environments", 2024 International Conference on Intelligent Robots and Systems (IROS).
- Hyunki Seong and David Hyunchul Shim, "Self-Supervised Interpretable Sensorimotor Learning via Latent Functional Modularity", 2024 International Conference on Machine Learning (ICML).
- Sungwon Nah, Jihyeok Kim, Chanhoe Ryu and David Hyunchul Shim, "Interaction-aware Trajectory Prediction for Opponent Vehicle in High Speed Autonomous Racing", 2024 IEEE Intelligent Vehicles Symposium (IV).
- Boseong Kim, Hyunki Seong, and D. Hyunchul Shim, "Topological Exploration using Segmented Map with Keyframe Contribution in Subterranean Environments", 2024 IEEE International Conference on Robotics and Automation (ICRA).
- Hyunki Seong and David Hyunchul Shim, "Self-Supervised Interpretable Sensorimotor Learning via Latent Functional Modularity", XAI4DRL@AAAI24
- Daegyu Lee, Hyunwoo Nam, Chanhoe Ryu, Sungwon Nah, and David Hyunchul Shim, "Resilient Navigation Based on Multimodal Measurements and Degradation Identification for High-Speed Autonomous Race Cars", 2023 IEEE Intelligent Vehicles Symposium (IV).
- Boseong Kim, Chanyoung Jung, D. Hyunchul Shim and Ali-akbar Agha-mohammadi, "Adaptive Keyframe Generation based LiDAR Inertial Odometry for Complex Underground Environments", 2023 IEEE International Conference on Robotics and Automation (ICRA).
- Jaewoong Yoo, Hyunki Seong, David Hyunchul Shim, Jung Ho Bae, Yong-Duk Kim. "Deep Reinforcement Learning-based Intelligent Agent for Autonomous Air Combat" 2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC 2022) (pp. 1-9). IEEE.
- Yonchorhor, Jedsadakorn, and David Hyunchul Shim. "Automatic Hyperparameter Optimization in the Drone Racing Context." RiTA 2020. Springer, Singapore, 2021. 67-76.
- Daegyu Lee, Hyungi Kim, and David Hyunchul Shim. "Framework for Deep Learning-enabled Building High-Definition Maps and Planning Routes for Autonomous Vehicles" 2021 21th International Conference on Control, Automation, and Systems (ICCAS 2021)
- Hyunki Seong, Chanyoung Jung, Seungwook Lee, and David Hyunchul Shim. "Learning to Drive at Unsignalized Intersections Using Attention-Based Deep Reinforcement Learning" The 24rd IEEE International Conference on Intelligent Transportation Systems (ITSC 2021)
- Chanyoung Jung, Seungwook Lee, Hyunki Seong and David Hyunchul Shim, "Game-Theoretic Model Predictive Control with Data-Driven Identification of Vehicle Model for Head-to-Head Autonomous Racing", ICRA workshop on Opportunities and Challenges with Autonomous Racing, Virtual, 31st, May, 2021.
- Kim, D., Ryu, H., Yonchorhor, J., & Shim, D. H., "A Deep-learning-aided Automatic Vision-based Control Approach for Autonomous Drone Racing in Game of Drones Competition", In NeurIPS 2019 Competition and Demonstration Track (pp. 37-46). PMLR. 2020.
- Kim, Donghwi, Taeyeon Kim, and David Hyunchul Shim. "Firefighter Drone Hardware Configuration and Vision-Based Detection & Control." RiTA 2020. Springer, Singapore, 2021. 101-108.
- Taejin Kim, Hyunchul Shim, "Road Semantic Segmentation Oriented Dataset for Autonomous Driving", 5th International Conference On Consumer Electronics Asia (ICCE-ASIA), Busan, Korea, 2020
- Chanyoung Jung, Deagyu Lee, Boseong Kim and David Hyunchul Shim, "Lane Level Path Planning for Urban Autonomous Driving using Vector Map", 5th International Conference On Consumer Electronics Asia(ICCE-ASIA), Busan, Korea, 2020
- Chanyoung Jung, Hyunki Seong and David Hyunchul Shim, "Time-to-Line Crossing Enhanced End-to-End Autonomous DrivingFramework", 23rd IEEE International Conference onIntelligent Transportation Systems(ITSC), Virtual, 2020
- Inhwan Wee, Dasol Lee, Taeyeon Kim, David Hyunchul Shim, "Diurnal Motion of Constellations using 150 Drones", 2019 19th International Conference on Control, Automation, and Systems (ICCAS 2019)
- Taeyeon Kim, Inhwan Wee, David Hyunchul Shim, "Occlusion Robust Object Detection and Tracking on a Real-time Drone", 2019 19th International Conference on Control, Automation, and Systems (ICCAS 2019)
- Eungchang Mason Lee, Inhwan Wee, Taeyeon Kim, David Hyunchul Shim, "Comparison of Visual Inertial Odometry using FlightGoggles Simulator for UAV", 2019 19th International Conference on Control, Automation, and Systems (ICCAS 2019)
- Jaehyun Lee, David Hyunchul Shim, "Electro-Optical Sensor Selection based on Flight Test for Detect-and-Avoid in Phase Two UAS", 38th Digital Avionics Systems Conference (DASC), San Diego, 2019
- Jaehyun Lee, Hanseob Lee, David Hyunchul Shim, "Low-SWaP EO sensor-based Robust Aircraft Detection for DAA Technology in UAS Integration", AIAA Aviation 2019 Forum, 2019
- Chanyoung Jung, Seokwoo Jung, David Hyunchul Shim, "A Hybrid Control Architecture For Autonomous Driving In Urban Environment", 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), Singapore, 2018
- Jaehyun Lee, Sunyou Hwang, David Hyunchul Shim, "Consideration of Airborne Detection System for DAA Technology in Remote Pilot Aircraft Systems," 37th Digital Avionics system Conference, London, 2018
- Inhwan Wee, Dasol Lee, David Hyunchul Shim, "Button Filtering for Converting Image to Coordinates of Swarming Drones", 2018 18th International Conference on Control, Automation, and Systems (ICCAS 2018)
- Jooyoung Lee, Inseok Hwang, David Hyunchul Shim, "UAS Surveillance in Low-altitude Airspace with Geofencing: Constrained Stochastic Linear Hybrid Systems Approach", AIAA Information Systems-AIAA Infotech@ Aerospace, 2018
- Sunyou Hwang, Jaehyun Lee, Heemin Shin, Sungwook Cho, David Hyunchul Shim, "Aircraft Detection using Deep Convolutional Neural Network in Small Unmanned Aircraft Systems", AIAA Information Systems-AIAA Infotech@ Aerospace, 2018
- Jaehyun Lee, Heemin Shin, David Hyunchul Shim, "Path-planning with collision avoidance for operating multiple Unmanned Aerial Vehicles in same airspace", AIAA Information Systems-AIAA Infotech@ Aerospace, 2018
- Hanseob Lee, Dasol Lee, Sunggoo Jung, David Hyunchul Shim, "Design of Tracking System using Bayesian Position Prediction for Highly Maneuvarable Aerial Target", AIAA Guidance, Navigation, and Control Conference, 2018
- Sunggoo Jung, Hanseob Lee, Sunyou Hwang and David Hyunchul Shim , "Real Time Embedded System Framework for Autonomous Drone Racing using Deep Learning Techniques", AIAA Science and Technology Forum and Exposition 2018 (SciTech2018), Kissimee, FL, USA, 12th, Jan., 2018
- Heemin Shin, Hyungi Kim, Jaehyun Lee, and David Hyunchul Shim, "Guidance Law of Tight Formation Flight regarding Collision Avoidance using Potential Field," 2017 Asia-Pacific International Symposium on Aerospace Technology, 16th, Oct, 2017.
- Heemin Shin, Jaehyun Lee and David Hyunchul Shim , "Design of a Virtual Fighter Pilot and Simulation Environment for Unmanned Combat Aerial Vehicles", AIAA Science and Technology Forum and Exposition 2017 (SciTech2017), Dallas, TX, USA, 11th, Jan., 2017
- Hanseob Lee, Dasol Lee and David Hyunchul Shim, "Receding Horizon-based RRT* Algorithm for a UAV Real-time Path Planner", AIAA Science and Technology Forum and Exposition 2017 (SciTech2017), Dallas, TX, USA, 11th, Jan., 2017
- Sunggoo Jung, David Hyunchul Shim and Enug-Tai Kim, "Helicopter Dynamic Model Identification by Conditional Attitude Hold Logic", AIAA Science and Technology Forum and Exposition 2017 (SciTech2017), Dallas, TX, USA, 11th, Jan., 2017
- Sungwook Cho, David Hyunchul Shim and Jinwhan Kim, "Gaussian Process-based Visual Servoing Framework for an Aerial Parallel Manipulator", AIAA Science and Technology Forum and Exposition 2017 (SciTech2017), Dallas, TX, USA, 11th, Jan., 2017
- Gun-Hee Moon, Byung-Yoon Lee, Min-Jea Tahk, David Hyunchul Shim,"Quaternion based attitude control and suboptimal rendezvous guidance on satellite proximity operation, Control Conference (ECC), 2016.06.29
- S Jung, U Lee, J Jung, DH Shim, "Real-time Traffic Sign Recognition system with deep convolutional neural network", Ubiquitous Robots and Ambient Intelligence (URAI), 2016.08.19.
- Unghui Lee , Jiwon Jung , Seunghak Shin , Yongseop Jeong , Kibaek Park , David Hyunchul Shim and In So Kweon, "EureCar Turbo: a Self-Driving Car that can Handle Adverse Weather Conditions", The International Conference of Intelligent Robots and Systems (IROS), Daejeon, Korea, Oct., 2016
- Hanjun Song, Heemin Shin, Haram You, Jun Hong, and David Hyunchul Shim, "Toward Autonomous Aircraft Piloting by a Humanoid Robot: Hardware and Control Algorithm Design," International Conference on Intelligent Robots and Systems (IROS) 2016, 2016.10.9.
- Dasol Lee and David Hyunchul Shim, "Developing Low-Cost Hardware Navigation Module for UAVs", The 2016 Asia-Pacific International Symposium on Aerospace Technology (APISAT-2016), Toyama, Japan, 26th, Oct., 2016.
- Sungwook Cho and David Hyunchul Shim, "Development of a Vision-enabled Aerial Manipulator using a Parallel Robot", The 2016 Asia-Pacific International Symposium on Aerospace Technology (APISAT2016), Toyama, Japan, 26th, Oct., 2016
- Jaehyun Lee, Heemin Shin, Hanseob Lee, and David Hyunchul Shim, "Task assignment and Cooperative strategy for Multiple Unmanned Aerial Vehicles", The 2016 Asia-Pacific International Symposium on Aerospace Technology (APISAT2016), Toyama, Japan, 26th, Oct., 2016
- Heemin Shin, Jaehyun Lee, Hyungi Kim, David Hyunchul Shim, "DESIGN THE GUIDANCE LAW FOR FORMATION FLIGHT OF MULTIPLE UAVS," the 30th Congress of the International Council of the Aeronautical Sciences, 28th, Sept.,2016
- Sungwook Cho, YeunDuk Jeong and David Hyunchul Shim, "Flight Tests of the Vision-based Target Sensing and Approaching", The 30th Congress of the International Council of the Aeronautical Sciences (ICAS2016), Daejeon, South Korea, 26th, Sept., 2016
- GunHee Moon, ByungYoon Lee, Min-Jea Tahk and David Hyunchul Shim, "Quaternion Based Attitude Control and Suboptimal Rendezvous Guidance on Satellite Proximity Operation", 2016 European Control Conference, Jun, 2016
- Hanseob Lee, Seokwoo Jung and David Hyunchul Shim, "Vision-based UAV Landing on the Moving Vehicle",2016 International Conference on Unmanned Aircraft Systems(ICUAS), Jun, 2016
- D. Lee, D. H. Shim, Path Planner Based on Bidirectional Spline-RRT* for Fixed-Wing UAVs, ICUAS 2016, 2016. 6
- GunHee Moon, ByungYoon Lee, Min-Jea Tahk and David Hyunchul Shim, "Optimal Rendezvous Guidance Using Linear Quadratic Control", The 4th International Conference on Intelligent and Automation Systems, Feb, 2016
- S Moon, K Yang, SK Gan, DH Shim, "Decentralized information-theoretic task assignment for searching and tracking of moving targets", International Conference on Unmanned Aircraft Systems Association, (ICUAS 2015)
- Seokju Lee, Sungsik Huh, Donggeun Yoo, In So Kweon, David Hyunchul Shim, "Rich feature hierarchies from omni-directional RGB-DI information for pedestrian detection", Ubiquitous Robots and Ambient Intelligence (URAI), 2015.10.28
- Y. D. Jung, S. W. Cho, D. H. Shim, "A Trajectory-Tracking Controller Design Using L1 Adaptive Control for Multi-Rotor UAVs", International Conference on Unmanned Aircraft Systems Association, pp. 132-138, Denver, CO, June. 2015.
- S. Cho, D. Lee, D. Shim, "Image-based Visual Servoing Framework for a Multirotor UAV using Sampling-based Path Planning", AIAA-2015-0846, AIAA SciTech2015:GNC conference, Gaylord Palms Hotel & Convention Center, Kissimmee, Orlando, FL, USA, 6th, Jan. 2015
- Seokju Lee, Sungsik Huh, Sungyeon Park and David Hyunchul Shim, "Development of an Exploration Rover Platform for Sample Return Mission", The 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2014)
- Dasol Lee and David Hyunchul Shim, "Spline-RRT* Based Optimal Path Planning of Terrain Following Flight for Fixed-Wing UAVs", The 11th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2014)
- Dasol Lee, HanJun Song, and David Hyunchul Shim, "Optimal Path Planning Based on Spline-RRT* for Fixed-Wing UAVs Operating in Three-Dimensional Environments", 2014 14th International Conference on Control, Automation, and Systems (ICCAS 2014)
- Heejin Jeong, David Hyunchul Shim and Sungwook Cho, "A Robot-Machine Interface for Full-functionality Automation using a Humanoid", IEEE/RSJ International Conference on Intelligent Robots and Systems, 14-18, Sept. 2014.
- Unghui Lee, Sangyol Yoon, David Hyunchul Shim, Pascal Vasseur, Cedric Demonceaux, "Local path planning in a complex environment for self-driving car", IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, 2014.
- Jiwon Jung, Yeondeuk Jung, Dong-Il You, David Hyunchul Shim, "A Flight Control System Design for Highly Unstable Unmanned Combat Aerial Vehicles," accepted to International Conference on Unmanned Aircraft Systems 2014.
- Dasol Lee, David Hyunchul Shim, "RRT-Based Path Planning for Fixed-Wing UAVs with Arrival Time and Approach Direction Constraints," accepted to International Conference on Unmanned Aircraft Systems 2014.
- Jeongwoon Kim, Yeondeuk Jung, Dasol Lee, David Hyunchul Shim, "Outdoor Autonomous Landing on a Moving Platform for Quadrotors using an Omnidirectional Camera," accepted to International Conference on Unmanned Aircraft Systems 2014.
- Heejin Jeong, Jeongwoon Kim, and David Hyunchul Shim, "Development of an Optionally Piloted Vehicle using a Humanoid Robot," AIAA SciTech 2014.
- Min-Won Seo, Sang-Hyeon Kim, Han-Lim Choi, and David Hyunchul Shim, "GVE-Based Relative Navigation with Image Sensors in Proximity Operation," APISAT 2013
- Sungwook Cho and David Hyunchul Shim, "Visual Docking and Servoing for Unmanned Spacecraft," APISAT 2013
- Sungsik Huh, David Hyunchul Shim, Jonghyuk Kim, "Integrated Navigation System using Camera and Gimbaled Laser Scanner for Indoor and Outdoor Autonomous Flight of UAVs," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3-8 Nov. 2013.
- Yeundeuk Chung, Sungwook Cho, and David Hyunchul Shim, "A Comprehensive Flight Control Design and Experiment of a Tail-sitter UAV," AIAA GNC, Aug. 2013
- Heemin Shin, David Hyunchul Shim, "An Autonomous Shipboard Landing Algorithm for Unmanned Helicopters", ICUAS'13, Atlanta, 2013.5.
- Jeongwoon Kim, David Hyunchul Shim, "A Vision-based Target Tracking Control System of a Quadrotor by using a Tablet Computer", ICUAS13', Atlanta, 2013.5.
- Usman Qayyum, Alex Martin, Jonghyuk Kim and David H. Shim, "Omni-VISER: 3D Omni Vision-Laser Scanner," ACRA, Wellington, New Zealand, December 2012
- Dong Il You, Yeon Deuk Jung, SungWook Cho, Hee Min Shin, Sang Hyup Lee, David Hyunchul Shim, "A Guidance and Control Law Design for Precision Automatic Take-off and Landing of Fixed-Wing UAVs," AIAA Guidance, Navigation, and Control Conference and Co-located Conference, 2012
- Sungwook Cho, Sungsik Huh, Hyoung Sik Choi and David Hyunchul Shim, "A Vision-based Detection and Tracking of Airborne Obstacles in Cluttered Environment," International Conference on Unmanned Aircraft Systems, June 2012
- Sungsik Huh, Sungwook Cho, Hyungsik Choi and David Hyunchul Shim, "Particle Filter-based Visual Detection of Approaching Aircraft in Complex Background Images," AIAA Infotech@Aerospace 2012, Hyatt Regency Orange County Garden Grove, CA, USA, 19-21 June 2012.
- Sungwook Cho, Sungsik Huh, Hyungsik Choi and David Hyunchul Shim, "An Image Processing Algorithm for Detection and Tracking of Aerial Vehicles," 50th IEEE Conference on Decision and Control, pp.7482-7487, Hilton Orlando Bonnet Creek, Orlando, USA, 12.Dec.2011-15.15.Dec.2011
- Sungsik Huh, Unghui Lee, Hyunchul Shim, Jong-Beom Park and Jong-Ho Noh, "Development of an Unmanned Coal Mining Robot and a Tele-Operation System", 2011 11th International Conference on Control, Automation and Systems, 2011 in KINTEX, Gyeonggi-do, Korea
- Yeunduk Jung, David Hyunchul Shim, "Development and Application of Controller for Transition Flight of Tail-Sitter UAV", 2011 International Conference On Unmanned Aircraft Systems, Sheraton Denver Downtown Hotel, Denver, USA
- E.M.Oh, S.H.Yoon, S.Y.Jang,S.Y.Kim and D.H.Shim, "The Design of Robust Controller using LMI-Based Mixed-Objective Optimization for Aircraft with High Aspect Ratio flexible Wing." International Forum of Aeroelasticity and Structural dynamics, Paris, June 26-30, 2011
- S. W. Moon, U.H. Lee, and D. H. Shim,"Study on Real-Time Obstacle Avoidance for Unmanned Ground Vehicles," International Conference on Control, Automation and Systems, Gyeonggi-do, October 2010.
- G. H. Kim, Y. D. Jung, S. O. Park ," Measurement and Prediction of Control Vane Force in the Wake of a Shrouded," International Congress of the Aeronautical Sciences, Nice, September 2010.
- Y. D. Jung, G. H. Kim, D. H. Shim, S. O. Park," Dynamic Modeling and Control System for a Shrouded Propeller System," International Congress of the Aeronautical Sciences, Nice, September 2010.
- S. W. Moon, and D. H. Shim," Development of a Path Planning Algorithm for UAVs in Dynamic Environment Using Differential Geometry and Probability Functions," International Congress of the Aeronautical Sciences, Nice, September 2010.
- Y. D. Jung, D. H. Shim, and N. Ananthkrishnan," Controller Synthesis and Application to Hover-to-Cruise Transition flight of a Tail Sitter UAV," AIAA Atmospheric Flight Mechanics, Toronto, August 2010.
- H. D. Oh, D. Y. Won, S. S Huh, D. H. Shim, and M. J. Tak," Indoor UAV Control Using Multi-camera Visual Feedback," International Conference & Exhibition on Unmanned Aerial Vehicles, Dubai, June 2010.
- D. I. You, and D. H. Shim," Autonomous Formation Flight Test of Multi-Micro Aerial Vehicles," International Conference & Exhibition on Unmanned Aerial Vehicles, Dubai, June 2010.
- D. I. You, D. H. Shim, B. H. Chae, and J. Y. Kwak, "Development of Autonomous Micro Aerial Vehicle Systems," Asia Pacific International Symposium on Aerospace Technology, Gifu, Japan, November 2009.
- S. W. Moon and D. H. Shim, "An Efficient Path Planning Algorithm for Unmanned Agricultural Helicopters in Complex Environment," 2nd International Forum on Rotorcraft Multidisciplinary Technology, Seoul, Korea, October 2009.
- Hyon-Dong Oh, Dae-Yeon Won, Sung-Sik Huh, Bong-Gun Park, David H. Shim and Min-Jae Tahk, "Indoor UAV Pose Estimation from Multi-Camera System Using EKF," UAV Symposium09, Reno, Nevada, June, 2009.
- S. S. Huh, D. H. Shim, "A Vision-based Automatic Landing Method for Fixed-wing UAVs," UAV Symposium09, Reno, Nevada, June 2009
- D. J. Lee, B. M. Min, M. J. Tahk, H. C. Bang, H. C. Shim, "Autonomous Flight Control System Design for a Blended Wing Body,"International Conference on Control, Automation, and Systems 2008, Oct. 14-17, Seoul , Korea
- D. H. Shim, S. Huh, and B. M. Min, "A Vision-based Automatic Landing System for Fixed-wing UAVs using an Inflated Airbag," AIAA Guidance, Navigation, and Control Conference, August 2008.
- D. H. Shim and S. Sastry, "A Dynamic Path Generation Method for a UAV Swarm in the Urban Environment," AIAA Guidance, Navigation, and Control Conference, August 2008
- D. H. Shim, J. S. Han and H. T. Yeo, "A Development of Unmanned Helicopters for Industrial Applications," UAV Symposium08, Orlando, Florida, June 2008
- S. S. Huh and D. H. Shim, "Development of a VTOL UAV with Vision-enabled Flight Management System," JSAS-KSAS Joint Conference, Kitakyushu, Oct. 2007
- D. H. Shim, "A High-precision Targeting System Design using a Small Helicopter UAV," Rotor Korea, Seoul, Oct. 2007.
- B. M. Min, H. Ryu, D. K. Sang, M. J. Tahk, H. C. Shim, "Autopilot Design Using Hybrid PSO-SQP Algorithm," Third International Conference on Intelligent Computing (ICIC 2007), Qingdao, China, Aug. 2007.
- D. H. Shim and S. Sastry, "An Evasive Maneuvering Algorithm for UAVs in See-and-Avoid Situations," American Control Conference, 2007.
- T. Templeton, D. H. Shim, and S. Sastry, "Autonomous Vision-based Terrain Mapping using an Unmanned Aerial Vehicle," International Conference on Robotics and Automation, 2007.
- D. H. Shim and S. Sastry, "A Situation-aware Flight Control System Design using Real-time Model Predictive Control for Unmanned Autonomous Helicopters," AIAA Guidance, Navigation, and Control Conference, Keystone, CO, 2006.
- D. H. Shim, H. Chung, H. J. Kim, S. Sastry, "Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles," AIAA Guidance, Navigation, and Control Conference, San Francisco, CA, 2005
- D. H. Shim, H. J. Kim, S. Sastry, "Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments," IEEE Conference on Decision and Control, Maui, HA, December 2003.
- D. H. Shim, H. Lee, "Mixed-objective Optimization of Track-following Servo using Linear Matrix Inequalities,Invited session on data storage technology," American Control Conference, Denver, Colorado, pp. 4323-4328, June 2003. (Won Best presentation Award)
- D. H. Shim, H. J. Kim, H. Chung, S. Sastry, "A Flight Control system for Aerial Robots: Algorithms and Experiments," 15th IFAC World Congress on Automatic Control, July 2002 (Nominated as one of best five papers for Best Application Paper Prize)
- D. H. Shim, H. Lee, "Optimization of Track-following Servo Controller for Ultra-High Density Drives," ASME Information Storage and Processing Systems Conference, Santa Clara, CA, June 2002.
- H. J. Kim, D. H. Shim, S. Sastry, "Flying Robots: Modeling, Control, and Decision Making," International Conference on Robotics and Automation, May 2002.
- D. H. Shim, H. J. Kim, H. Chung, S. Sastry, "Nonlinear Model Predictive Tracking Control for Rotorcraft-based Unmanned Aerial Vehicles," American Control Conference, Alaska, May 2002
- O. Shakernia, C. S. Sharp, R. Vidal, D. H. Shim, Y. Ma, S. Sastry, "Multiple View Motion Estimation and Control for Landing an Unmanned Aerial Vehicle," International Conference on Robotics and Automation, 2002.
- D. H. Shim, H. J. Kim, H. Chung, S. Sastry, "Multi-functional Autopilot Design and Experiments for Rotorcraft-based Unmanned Aerial Vehicles," 20th Digital Avionics system Conference, Florida, 2001
- H. J. Kim, R. Vidal, D. H. Shim, O. Shakernia, S. Sastry, "A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Conference on Decision and Control, 2001
- D. H. Shim, H. J. Kim, S. Sastry, "System Identification and Control Synthesis for Rotorcraft-based Unmanned Aerial Vehicles," IEEE International Conference on Control Applications, Anchorage, September 2000.
- D. H. Shim, H. J. Kim, S. Sastry, "Hierarchical Control System Synthesis for Rotorcraft-based Unmanned Aerial Vehicles," AIAA Guidance, Navigation and Control Conference, Denver, August 2000.
- D. H. Shim, T. J. Koo, F. Hoffmann, S. Sastry, "A Comprehensive Study on Control Design of Autonomous Helicopter," IEEE Conference on Decision and Control, Florida, December 1998.
- T. J. Koo, F. Hoffmann, H. Shim, B. Sinopoli, S. Sastry, "Hybrid Control of an Autonomous Helicopter," IFAC Workshop on Motion Control, 21-23 September 1998, Grenoble, France.
- T. J. Koo, D. H. Shim, O. Shakernia, B. Sinopoli, Y. Ma, F. Hoffmann, S. Sastry, "Hierarchical Hybrid System Design on Berkeley UAV," International Aerial Robotics Competition, Richland, Washington, USA, August 1998
- D. H. Shim, M. Kochem, M. Tomizuka, "Use of accelerometer for precision motion control of linear motor driven positioning system," Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society, IECON, Aachen, Germany, 1998
- D. H. Shim, E. H. Lee, H. Park, K. I. Lee, "Design of Hovering Attitude Controller for a Model Helicopter," Proceedings of SICE, Kanazawa, Japan, 1993.
- D. H. Shim, E. H. Lee, H. Park, K. I. Lee, "Design of Hovering Flight Controller for a Model Helicopter," Proceedings of SICE, Kumamoto, Japan, 1992.
Domestic Conference Papers
- 노주형, 김보성, 김도경, 김지혁, 심현철. "다층 실내 환경에서 계단 극복이 가능한 궤도형 로봇의 신뢰성 있는 자율주행 시스템", 제19회 한국로봇종합학술대회, 2024.2, 우수논문상
- 나성원, 김지혁, 심현철. "고속 자율주행 레이싱에서의 장거리 객체 인식을 위한 센서 퓨전 알고리즘", 제19회 한국로봇종합학술대회, 2024.2
- 강규리, 심현철. "엘리베이터 탑승을 위한 모바일 매니퓰레이터 시스템", 제19회 한국로봇종합학술대회, 2024.2
- 김보성, 이승욱, 박재용, 심현철, "복합적인 실내 환경 내 신뢰성 있는 자율 비행을 위한 3차원 장애물 지도 생성 및 경로 계획 알고리즘", 제18회 한국로봇종합학술대회, 2023.2, 우수논문상
- 이승욱, 조성욱,신희민,심현철, "영상 기반 공중 물체 탐지와 위치 추정을 통한 궤적 예측 방법", 2023 항공우주시스템공학회 학술행사 논문집, 2023.5
- 조성욱,심현철,신희민, "딥러닝 기반 중장거리 불법 드론 인식 모델과 추적 알고리즘 운용 전략 연구", 2023 항공우주시스템공학회 학술행사 논문집, 2023.5
- 박재용,이승욱,김보성,한동훈,심현철, "모델 예측 제어 기법을 활용한 쿼드롭터의 타겟 추적", 2023 항공우주시스템공학회 학술행사 논문집, 2023.5
- 박재용, 김보성, 이승욱, 심현철, "유리에서 유발된 잡음의 효율적인 제거를 위한 라이다 센서 필터링 알고리즘", 제 18회 한국로봇종합학술대회, 2023.2
- 민성재, 김형주, 심현철, "자율 항공 조종을 위한 인간형 조종사 로봇", 제 18회 한국로봇종합학술대회, 2023.2
- 이대규, 심현철, "다층 환경에서의 라스트 마일 배송 서비스를 위한 경로 계획 알고리즘", 제18회 한국로봇종합학술대회, 2023.2
- 김태진, 심현철, "자율 주행 전동 스쿠터의 개념 연구 및 시스템 개발", 제17회 한국로봇종합학술대회, 2022.5
- 성현기, 심현철, "비정형지형 탐색을 위한 주행 가능성 기반 경로 계획", 제17회 한국로봇종합학술대회, 2022.5
- 강규리, 심현철, "도심 자율주행을 위한 차량 및 장애물 인식 알고리즘", 제17회 한국로봇종합학술대회, 2022.5
- 장윤하, 성현기, 정명근, 심현철, "Deep reinforcement learning based End-to-End Autonomous Driving Network with Semantic map", 제17회 한국로봇종합학술대회, 2022.5
- 이승욱, 김보성, 심현철, "영상 및 음성 데이터 수집을 위한 실내 드론 자율비행 알고리즘", 제17회 한국로봇종합학술대회, 2022.5
- 김보성, 이승욱, 심현철, "다층 건물 재난 상황 대응을 위한 자율 비행 드론 시스템 개발", 제17회 한국로봇종합학술대회, 2022.5
- 이대규, 남현우, 심현철, "Wi-Fi 수신신호강도를 활용한 다층 환경에서의 항법에 관한 연구", 제17회 한국로봇종합학술대회, 2022.5
- 김현지, 정찬영, 성현기, 오현찬, 문상근, 심현철, "3D LiDAR/카메라 센서 융합을 이용한 다중 물체 위치 추정", 2019 한국자동차공학회 춘계학술대회, 2019.5
- 류현지, 이대규, 김태진, 문상근, 심현철, "K-CITY 사례를 통한 V2X 활용에 관한 연구", 2019 한국자동차공학회 춘계학술대회, 2019.5
- 성현기, 김현지, 문상근, 심현철, "Euclidean Cluster Detect기반 객체 인식 환경 구성 및 분석", 2019 한국자동차공학회 춘계학술대회, 2019.5
- 이승욱, 이승현, 문상근, 심현철, "자율주행 자동차의 경로 추종 제어 프레임 워크", 2019 한국자동차공학회 춘계학술대회, 2019.5
- 한동희, 정찬영, 심현철, "32ch LiDAR를 활용한 모바일 로봇의 보도 검출", 2019 한국자동차공학회 춘계학술대회, 2019.5
- 위인환, 이응창, 김태연, 심현철, "Flight Goggles 시뮬레이터의 모델 분석 및 움직이는 가상의 목표를 이용한 자율 비행", 2019 한국항공우주학회 춘계학술대회, 2019.4
- 김태연, 위인환, 이응창, 심현철, "자율주행 드론 레이싱을 위한 영상기반 게이트 검출 알고리즘", 2019 한국항공우주학회 춘계학술대회, 2019.4
- 이응창, 위인환, 김태연, 문상근, 심현철, "FlightGoggles 시뮬레이터를 이용한 Drone의 Visual-Inertial 상태 추정(VINS-Mono)에 관한 분석", 2019 한국항공우주학회 춘계학술대회, 2019.4
- 이승욱, 이대규, 정찬영, 심현철, "단일 모터를 통한 기구적 Anti-SABA 페달 제어 장치 개발", 2018 한국자동차공학회 추계학술대회, 2018.11
- 김태진, 심현철, "자율주행자동차의 주변 물체 인식을 위한 라이다 데이터의 바닥 제거에 관한 연구", 2018 한국자동차공학회 추계학술대회, 2018. 11
- 정찬영, 이대규, 이승욱, 심현철, "자율 주행을 위한 Two-point model 기반 차선 변경 시뮬레이션", 2018 한국자동차공학회 추계학술대회, 2018.11
- 이대규, 정찬영, 심현철, "Hyperbolic tangent 함수를 이용한 능동형 전방 장애물 회피 경로 생성", 2018 한국자동차공학회 추계학술대회, 2018.11
- 오현찬, 김태진, 정찬영, 심현철, "가상 현실 기반의 자율주행을 위한 차량 센서 정보 취득 기법 개발", 2018 한국자동차공학회 추계학술대회, 2018.11
- 이재현, 이한섭, 심현철, "충돌회피기술을 위한 광학센서를 이용한 원/근거리 딥러닝기반 항공기 검출", 2018 한국항공우주학회 추계학술대회, 2018.11
- 위인환, 이다솔, 김태연, 심현철, "적도좌표계를 활용한 별자리 군집 비행", 2018 한국항공우주학회 추계학술대회, 2018.11
- 이한섭, 심현철, "충돌 각 제어 유도 법칙을 적용한 자동 착륙 알고리즘 연구", 2018 한국항공우주학회 추계학술대회, 2018.11
- 이다솔, 심현철, "확률적 군집 경로 계획 알고리즘에 대한 연구", 2018 한국항공우주학회 추계학술대회, 2018.11
- 정찬영, 이대규, 심현철, "Faster R-CNN 을 이용한 영상 기반 신호등 인식 시스템 연구", 한국자동차공학회 춘계학술대회, 2018.06
- 이대규, 정찬영, 심현철, "Line of sight guidance 를 이용한 전방 장애물 회피 방법 제안 및 개선점", 한국자동차공학회 춘계학술대회, 2018.06
- 이다솔, 위인환, 심현철, "소형 드론을 활용한 실외 50 대 자율 군집비행", 2018 제어로봇시스템학회 학술대회, 2018.5
- 김태진, 이다솔, 이재현, 심현철, "KINECT 를 활용한 다중 드론 제어", 2018 제어로봇시스템학회 학술대회, 2018.5
- 이재현, 심현철, "소형무인기를 활용한 충돌회피 비행시험을 위한 well clear 정의", 항공우주학회 학술발표회, 2018.4.
- 이한섭, 신희민, 심현철, "심층 강화학습을 이용한 침투 드론에 대한 방어 전략 학습 알고리즘 연구", 항공우주학회 학술발표회, 2018.4
- 이다솔, 심현철, "소형 쿼드로터 플랫폼 개발 및 실외 20 대 자율 군집비행", 2017 한국항공우주학회 추계학술대회, 2017.11
- 이재현, 이다솔, 신희민, 황선유, 심현철, "학습기반 DAA 기술을 위한 다수 비행체 시뮬레이션", 2017 한국항공우주학회 추계학술대회, 2017.11
- 이한섭, 오현찬, 심현철, 임선빈, 민경원, 김선엽, "무인기를 이용한 차선 기반 경로 추종 알고리즘 개발", 2017 한국항공우주학회 추계학술대회, 2017.11
- 신희민, 김현기, 이재현, 심현철, "기본 전투 기동 기반 근접 자율 교전 알고리듬 설계", 2017 한국항공우주학회 추계학술대회, 2017.11
- 정성구, 황선유, 신희민, 심현철, "드론레이싱을 위한 딥러닝 기반 유도제어", 2017 한국항공우주학회 추계학술대회, 2017.11
- 강재민, 심현철, "실내 군집 비행을 위한 저가 소형 드론 비행 시스템 확장 개발", 2017 한국항공우주학회 추계학술대회, 2017.11
- 김현기, 신희민, 심현철, "Actor-Critic Method 기반의 자율 공중 교전 알고리즘 연구", 2017 한국항공우주학회 추계학술대회, 2017.11
- 황선유, 이재현, 심현철, "심층 합성곱 신경망을 이용한 단일 카메라 영상에서의 항공기 탐지 및 헤딩 추정", 2017 한국항공우주학회 추계학술대회, 2017.11
- 이한섭, 심현철, "단안카메라를 이용한 학습기반 드론 탐지 및 추적 알고리즘 연구", 2017 한국항공우주학회 추계학술대회, 2017.11
- 정찬영, 홍준, 정지원, 심현철, "자율 주행 자동차를 위한 GPS 주행 궤적 기반의 ICP 알고리즘을 이용한 추종 경로 보정 기법", 한국자동차공학회 추계학술대회, 2017.11
- 이재현, 황선유, 심현철, "민간 무인항공기의 공역 통합을 위한 충돌회피 기법 기술동향", 2017년도 한국항행학회 학술대회. 2017.10
- 조성욱, 정성구, 이재현, 신희민, 심현철, "ROS 기반 다수 색상표적 검출, 군집화 및 위치계산", 제어로봇시스템학회 학술대회, 2017.5
- 한정욱, 김진환, 심현철, "실내 주차장 환경에서 무인자동차의 측위 및 매핑을 위한 형상정보 기반의 SLAM", 제어로봇시스템학회 학술대회, 2017.5
- 이병윤, 이동연, 심상욱, 문건희, 탁민제, 심현철, "인공위성 근접 운용을 위한 적응 조세단계 파티클 필터 적용에 관한 연구", 한국항공우주학회 2017년도 춘계학술대회, 2017.4
- 문건희, 김상현, 이병윤, 탁민제, 심현철, "인공위성 근접운용 연구를 위한 6 자유도 시뮬레이터 개발", 한국항공우주학회 2017년도 춘계학술대회, 2017.4
- 이한섭, 이다솔, 조성욱, 김현기, 심현철, "무인기를 이용한 움직이는 물체 위의 영상 기반 자동 착륙 시스템 개발", 한국항공우주학회 2017년도 춘계학술대회, 2017. 4
- 황선유, 정석우, 심현철, "심층 합성곱 신경망을 이용한 영상에서의 비행체 검출", 한국항공우주학회 2017년도 춘계학술대회, 2017. 4
- 이다솔, 심현철, "쿼드로터 무인기를 위한 실시간 요 각도 보정 알고리즘 설계 및 실험", 한국항공우주학회 2017년도 춘계학술대회, 2017. 4
- 김현기, 신희민, 이한섭, 이재현, 심현철, "강화학습 기반 공중교전 알고리즘 연구", 한국항공우주학회 2017년도 춘계학술대회, 2017. 4
- 이재현, 심현철, "다양한 시나리오 기반의 비행시험을 위한 복수 무인기 통합운용 환경 개발", 제 12회 한국로봇종합학술대회, 2017. 2
- 이한섭, 정성구, 이다솔, 심현철, "스테레오 영상기반 무인기를 이용한 비행 물체 포획시스템 개발", 한국로봇종합학술대회, 2017
- 정성구, 이한섭, 조성욱, 심현철, "영상기반 비주얼 서보잉을 통한 장애물 통과 기법", 한국로봇종합학술대회, 2017
- 강재민, 이다솔, 심현철, "확장 가능한 소형 드론 플랫폼 개발", 한국로봇종합학술대회, 2017
- 황선유, 심현철, "Double Q-learning 을 이용한 쿼드로터의 높이 제어 시뮬레이션", 한국로봇종합학술대회, 2017
- 정지원, 이웅희, 정석우, 오현찬, 홍준, 유하람, 심현철, "영상 및 레이저데이터 융합을 통한 실도로 자율주행 차량 개발", 한국자동차공학회 춘계학술대회, 2016.05
- 도종용, 강정원, 정석우, 정지원, 심현철 "차선 영역이 분할된 AVM 영상을 이용한 차선 수준 차량 위치 추정 기법", 대한기계학회 2016년도 학술대회, 2016.12
- 신희민, 이재현, 김현기, 심현철, " 무인전투기의 자율 공중 교전 알고리듬 기술 동향 및 제어기 설계", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 이한섭, 정성구, 이다솔, 심현철, "무인기를 이용한 스테레오 영상기반 근거리 비행 물체 탐지 및 추적시스템 ", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 이재현, 신희민, 김현기, 심현철, "도심운용을 고려한 다수 무인비행체의 경로계획법 연구 ", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 정성구, 조성욱, 이한섭, 심현철, "포인트 클라우드 유클리디안 를 통한 3차원 영상기반 장애물 탐지 ", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 김현기, 신희민, 이재현, 심현철 "고정익 무인기의 충돌회피를 고려한 정밀 편대비행 유도법칙 연구 ", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 이다솔, 심현철, "멀티로터 무인기의 선가속도 Observer 및 Controller 설계", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 강재민, 이다솔, 심현철, "리눅스 컴퓨터 기반 소형 드론 플랫폼 개발", 한국항공우주학회 2016년도 추계학술대회, 2016.11
- 이한섭, 심현철, "무인기의 실시간 경로계획을 위한 RH-RRT* 알고리즘 연구", 항공우주학회 춘계학술대회, 2016
- 홍준, 이한섭, 심현철, "상용 LTE모뎀을 이용한 다 개체 장거리 비행관제 네트워크 시스템 구축", 항공우주학회 춘계학술대회, 2016
- 오현찬, 이웅희, 정지원, 정석우, 유하람, 홍준, 정찬영, 도종용, 심현철, "곡선 근사 방식을 이용한 차선 추정 기법", 한국자동차공학회 춘계학술대회, 2016
- 홍준, 이웅희, 정찬영, 도종용, 심현철, "상용 LTE모뎀을 이용한 자율주행 자동차 네트워크 구성 및 어플리케이션 적용", 한국자동차공학회 춘계학술대회, 2016
- 정석우, 이웅희, 정지원, 심현철, "심층 컨볼루션 신경망을 이용한 교통 표지판 인식 알고리즘 개발", 한국자동차공학회 춘계학술대회,2016
- 신희민, 이재현, 유동일, 심현철, "복수 무인기의 편대 비행을 위한 유도 법칙 설계", 한국항공우주학회 2016년도 춘계학술대회, 2016.4, 2016
- 이다솔, 심현철, "저가 하드웨어 기반 소형 비행제어 컴퓨터 개발", 한국항공우주학회 2016년도 춘계학술대회, 2016.4
- 조성욱, 심현철, "무인항공기의 실내 경로점 비행제어시스템 개발", 한국로봇종합학술대회, 2016
- 이한섭, 정석우, 심현철, "무인기의 영상 기반 목표물 추적 및 포획", 한국로봇종합학술대회, 2016
- 박성연, 심현철, "깊이 영상 기반 카메라 모션 추정을 위한 효율적인 포인트 샘플링 기법", 한국로봇종합학술대회, 2016
- 심현철,조성욱,이한섭,"국내 무인항공기 운용기반 구축방안 수립 연구", 항공우주학회 추계학술대회, 2015.11.
- 이장호, 최형식,유혁 심현철, "고고도장기체공 무인기 대기자료시스템의 고장검출 기법에 관한 연구", 한국항공우주학회 추계학술대회, 2015.11
- 송한준, 신희민, 유하람, 심현철, "조종사 로봇을 이용한 고정익 항공기의 무인화 기법 연구", 춘계항공우주학회,2015
- 조성욱, 정연득, 심현철, "무인항공기의 실내비행을 위한 2.5차원 자기위치추정기반 항법연구 및 비행실험", 춘계항공우주학회,2015
- 정지원, 이웅희, 신승학, 정용섭, 박기백, 심현철, 권인소 "센서 퓨전을 이용한 자율 주차 시스템 개발", 한국자동차공학회,2015
- 송한준, 이석주, 조성욱, 심현철, "이종 자율 무인기 협업 체계를 이용한 적 진지 제압 비행실험", 춘계한국항공우주학회,2015
- 이장호,김성필,심현철, "시간지연제어기법을 이용한 헥사콥터 작동기 다중고장 허용제어", 항공우주학회 학술발표회, 2014.11.
- 신희민, 조성욱, 정지원, 유동일, 정연득, 심현철, 양광진, "Single GPS와 1D LiDAR를 이용한 고정익 무인 항공기의 자동 이착륙 알고리듬 설계," 추계한국항공우주학회, 2014
- 김상현,최한림,신현철, "Region-Based Active Contour 기법을 적용한 단일 영상 기반 위성 위성 상대 항법", 추계한국항공우주학회, 2014
- 박성연, 허성식, 이다솔, 심현철, "지상 공중 복합임무를 위한 형태변환 무인 하이브리드 이동체의 개발," 추계한국항공우주학회, 2014
- 허성식, 조성욱, 심현철, "저가형 LiDAR 를 장착한 쿼드로터의 3 차원 실내 항법 및 자동비행," 한국로봇종합학술대회, 2014
- 이석주*, 송한준, 심현철, "영상기반 모션센서를 이용한 로봇 손 시스템 개발," 제어로봇시스템학회 학술대회, 2014
- 이다솔*, 심현철, "횡방향 가속도 제한을 고려한 고정익 무인항공기의 Spline-RRT* 기반 최적 경로계획," 제어로봇시스템학회 학술대회, 2014
- 신희민, 심상욱, 심현철, 최병철, "민간 무인 항공기 실용화를 위한 충돌 회피 기술 동향," 2014 한국항공운항학회 춘계학술대회, 2014.05.23
- 이석주, 허성식, 이다솔, 조성욱, 심현철, "샘플 채취 임무를 위한 탐사로버 플랫폼 개발," 춘계항공우주학회, 2014
- 이다솔*, 조성욱, 심현철, "최적 경로생성기법을 이용한 영상기반 비주얼 서보잉 연구," 춘계항공우주학회, 2014
- 이다솔*, 심현철, "접근방향과 도착시간을 고려한 고정익 무인항공기의 RRT기반 경로계획," 춘계항공우주학회, 2014
- 정지원*, 정연득, 유동일, 심현철, "스텔스 무인전투기의 비행제어 시스템 설계," 춘계항공우주학회, 2014
- 신희민, 유동일*, 심현철, "무충돌 전환을 고려한 Fly-By-Wire 헬리콥터 비행 제어 체계 설계," 춘계항공우주학회, 2014
- 이웅희, 윤상열, 심인욱, 신승학, 최종원, 오지원, 심현철, 권인소, 최세범. "복잡한 도로 상황에서의 환경인식 및 충돌회피 가능한 무인자율주행차량 개발.", 한국로봇학회 (2013).
- 정지원, 심현철, "L1 적응제어를 이용한 스텔스 형상의 무인전투기 제어," 추계한국항공우주학회, 2013
- 정연득, 심현철, "L1 적응제어기법을 이용한 멀티로터 무인항공기의 궤적 추종기법 설계," 추계한국항공우주학회, 2013
- 김정운, 이다솔, 심현철, "스마트폰을 이용한 무인기의 영상기반 목표물 탐지 및 위치 추정 시스템," 추계한국항공우주학회, 2013
- 김상현, 최한림, 심현철, "인공위성 근접운용을 위한 단일 영상 기반 상대항법에 대한 연구," 추계한국항공우주학회, 2013
- 정연득, 조성욱, 김정운, 심현철, "실외 환경에서의 이종 무인 항공기 임무 수행을 위한 제반 시스템 구현," 추계한국항공우주학회, 2013
- 정희진, 심현철, 조성욱, "휴머노이드를 이용한 무인화 기법 연구," 추계한국항공우주학회, 2013
- 유동일, 심현철," BFM 원리기반무인전투기의자율근접 교전 유도 법칙", 2013 한국군사과학기술학회 종합학술대회, 2013.07.
- 이웅희, 심현철, "자율 주행 차량을 위한 3차 방정식을 이용한 경로 추종과 장애물 회피 경로 생성," 2013년 한국자동차공학회 부문 종합학술대회, 2013년 5월
- 유동일, 심현철, "무인전투기의 자율 근접 공중 교전을 위한 가상 추적점 기반 전술 기동 유도 법칙 설계", 2013년도 춘계 한국항공우주학회, 2013.
- 조성욱, 허성식, 심현철, "무인우주비행체의 영상기반 자동 도킹을 위한 도킹유도용 마커인식 및 추적 알고리듬", 2013년도 춘계 한국항공우주학회, 2013.
- 정연득, 조성욱, 심현철, "테일 시터 방식 수직 이착륙 무인기의 다중 비행 모드 제어 시스템 설계 및 비행 실험", 2013년 춘계 한국항공우주학회, 2013
- 신희민, 심현철, "무인 헬리콥터의 측풍을 고려한 자동 함상 착륙 유도 법칙 설계", 2013년도 춘계 한국항공우주학회, 2013.
- 정지원, 심현철, "L1 적응 제어를 이용한 UCAV 1303의 피치 브레이크 제어", 2013년도 춘계 한국항공우주학회, 2013.
- 양희돈, 심현철, "Deep Stall 회복 제어 시 최적의 모드 전환을 위한 Phase Portrait 및 Control Level Contour 활용", 2013년도 춘계 한국항공우주학회, 2013.
- 심상욱, 조성욱, 탁민제, 심현철, 원대연, "조세단계 파티클 필터를 이용한 우주 영상 내 원거리 표적 탐지 기법", 2013년도 춘계 한국항공우주학회, 2013.
- 이상협, 심현철, "L1 적응 제어를 이용한 피치 브레이크 현상을 갖는 무인 전투기의 안정성 증대 제어," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 조성욱, 허성식, 정연득, 심현철, "무인항공기의 영상기반 도로검출, 추적 및 궤적추종 비행실험", 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 이재명, 탁민제, 이덕주, 심현철, 안재명, "전투기 공중전투기동 및 화력제어 논리 연구 개발," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 김정운, 조성욱, 정지원, 허성식, 심현철, "태블릿 컴퓨터용 무인항공기 지상 모니터링 시스템의 개발," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 정연득, 심현철, "비행 실험을 고려한 모델 불확실성에 강건한 비행 제어 시스템 설계," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 심현철, 이지윤, "민수용 무인항공기 통제 및 항법 기반구축 사전연구," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 신희민, 유동일, 심현철, "수직 이착륙기의 자동 함상 이착륙 알고리듬과 다양한 기체의 착륙 특성," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 허성식, 심현철, "무인항공기의 실내비행을 위한 레이저-영상센서 기반의 3차원 항법 연구," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 유동일, 심현철, "근접 공중전 상황에서의 무인전투기 자율 공중 교전에 관한 연구," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 정연득, 유동일, 신희민, 심현철, "Fly-By-Wire 헬리콥터 개발을 위한 모델 불확실성에 강건한 L1 적응 제어기 설계," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 최형식, 유동일, 심현철, "소형 헬리콥터 로터 모델 충실도 향상 및 호버링 검증," 2012년도 추계 한국항공우주학회, 11월 15일, 제주도 라마다 호텔, 2012.
- 신희민, 유동일, 심현철, "무인 헬리콥터의 함상 자동 이착륙 시스템 개발에 관한 연구," 제8회 국방기술학술대회, 서울시립대학교, 2012년7월13일
- 허성식, 조성욱, 심현철, "무인항공기의 실내 항법을 위한 3차원 공간지도작성 및 몬테카를로 위치추정기법, " 항공우주학회 춘계 학술대회, 2012
- 조성욱, 허성식, 심현철, 최형식,"무인기의 영상기반 저고도/근접 비행체 탐지, 추적 및 충돌회피", 항공우주학회 춘계 학술대회, 2012
- 이상협, 심현철,"무인전투기의 코브라 기동을 위한 적응 슬라이딩 제어에 대한 연구", 항공우주학회 춘계 학술대회, 2012
- 신희민, 정연득, 유동일, 심현철,"틸트로터 비행체 제어기 구성에 관한 선행 연구", 항공우주학회 춘계 학술대회, 2012
- 신희민, 유동일, 정연득, 심현철, "Fly-By-Wire 헬리콥터 개발을 위한 모델 불확실성에 강건한 시간 지연 적응 제어기 설계", 항공우주학회 춘계 학술대회, 2012
- 문상우, 오은미, 유동일, 심현철, "복수 무인기의 임무할당과 경로생성 통합 및 X-PLANE을 이용한 모의실험 검증", 추계 학술대회, 2011
- 유동일, 심현철, "비행체 운동 역학을 고려한 가속도 기반 경로 추종 시선각 유도 법칙 설계", 추계 학술대회, 2011
- 유동일, 정연득, 조성욱, 신희민, 이상협, 심현철, 최형식, 이상종, "무인항공기 자동 이착륙 시스템 설계 및 구현에 관한 연구", 추계 학술대회, 2011
- 허성식, 이웅희, 심현철, 박종범, 노종호, "지하환경탐사를 위한 무인주행로봇 및 원격조종시스템 개발," ICROS 2011, 조선대학교, 2011년 5월 27일
- 이웅희, 이건홍, 윤상열, 심현철, 조성호, "무인 자동차를 위한 점 항법과 영상 기반 차선 검출을 융합한 차선 유지 시스템 개발." 2011한국자동차공학회부문종합학술대회
- 윤선혜, 이학태, 심현철, "소형 무미익 BWB 무인 항공기의 안정성 및 조종성 증대 " 항공우주학회 춘계 학술발표회, 2011
- 양희돈, 김종섭, 심현철, "깊은 실속으로부터 자동 회복을 위한 피드백 선형화 제어법칙 적용 " 항공우주학회 춘계 학술발표회, 2011
- 정연득, 조성욱, 심현철, "모델 변화에 강건한 테일 시터 무인기의 천이 비행 연구 " 항공우주학회 춘계 학술발표회, 2011
- 조성욱, 허성식, 유동일, 심현철, 최형식, "무인항공기의 근거리 비행체 탐지 및 추적을 위한 영상처리 알고리듬 " 항공우주학회 춘계 학술발표회, 2011
- 정연득, 심현철, "L1 적응 제어 기법을 기용한 외형 손상 및 고장 허용 제어 연구 " 항공우주학회 춘계 학술발표회, 2011
- 오은미, 장세용, 김상용, 심현철, "다목적 최적 설계를 이용한 서보공탄성 모델의 자세 추종 제어기 설계," 항공우주학회 춘계 학술발표회, 2011
- 윤선혜, 이학태, 심현철, "Tailless BWB 형상 항공기의 방향 안정성 증대를 위한 장치의 실험적 검증 : Flip-up type MiTE의 적용," 항공우주학회 추계학술발표회, 2010.
- 이웅희, 심현철, "신경망 구조를 이용한 비선형 시스템의 식별과 제어 시스템 설계," 항공우주학회 추계학술발표회, 2010.
- 오은미, 윤선혜, 장세용, 김상용, 심현철, "고세장비 유연 날개 비행체의 서보공탄성 해석," 항공우주학회 추계학술발표회, 2010.
- 유동일, 최형식, 조성욱, 심현철, 이상종, "Time Delay Control을 이용한 무인항공기 자세안정화 제어기 설계 및 비행시험 결과," 항공우주학회 추계학술발표회, 2010.
- 유동일, 심현철,"초소형 비행체의 자동 편대 시험," 항공우주학회 추계학술발표회, 2010.
- 정연득, 조성욱, 오은미, 심현철, "고정익 비행체의 호버링 비행제어기 설계 및 비행실험," 항공우주학회 추계학술발표회, 2010.
- 최형식, 이장호, 이상종, 김응태, 심현철, " TDC(Time Delay Control) 비선형 강건 제어기법을 이용한 항공기 SCAS 설계," 항공우주학회 추계학술대회, 2010
- 문상우, 오은미, 심현철, "복수무인기의 객체지향적인 군집지능 시스템을 위한 개념 설계 연구," 항공우주학회 추계학술발표회, 2010.
- 문상우, 심현철,"실시간 연산을 위한 복수무인기의 효율적인 경로생성 및 충돌회피 통합," 항공우주학회 추계학술발표회, 2010.
- 정연득, 심현철, N.Ananthkrishnan, "테일 시터 무인기의 천이 비행을 위한 제어시스템 설계," 항공우주학회 추계학술발표회, 2010.
- 정연득, 심현철, "덕티드 팬 무인항공기의 슬라이딩모드 제어기 설계,"한국군사과학기술학회 종합학술대회, 2010.
- 유동일, 이웅희, 정연득, 조성욱, 심현철"무인항공기 자동이착륙 제어 시스템 설계에 관한 연구," 한국자동제어학회 춘계학술대회, 2010.
- 허성식, 이웅희, 심현철, 노종호 " 지하탐사 및 자원채굴용 무인로봇의 원격운용을 위한 힘반향기법 및 자율주행 연구," 한국자동제어학회 춘계학술대회, 2010.
- 문상우, 장대성, 심현철"부분적으로 알려진 환경에서의 무인기를 이용한 효율적인 경로 계획법 개발," 한국자동제어학회 춘계학술대회, 2010.
- 이웅희, 조광현, 진효민, 문상우, 유상열, 심현철, 최세범, "무인자율주행차량 개발 및 운동계획법 연구," 한국자동제어학회 춘계학술대회, 2010.
- 윤선혜, 이학태, 심현철 " Tailless BWB 항공기의 방향 안정성 증대 및 조향성 향상," 항공우주학회 춘계학술대회, 2010.
- 정연득, 심현철 "덕티드 팬 무인항공기의 제어시스템 설계 및 비행 실험," 항공우주학회 춘계학술대회 , 2010.
- 문상우, 심현철 "미지의 환경에서의 복수 회전익 무인기에 대한 충돌회피 및 군집비행," 항공우주학회 춘계학술대회, 2010.
- 나윤주, 최승원, 정연득, 조성욱, 심현철 "가변 피치 프로펠러 쿼드로터의 연구, 개발 및 자세제어비행," 항공우주학회 춘계학술대회, 2010.
- 장대성, 심현철, "시공간 벡터 탐색을 이용한 무인기 충돌회피 및 유도 기법," 항공 우주학회 춘계학술대회, 2010.
- 심현철, 이영호, "무인전투기의 근접공중전 기동 알고리즘 개발," 항공우주학회 춘계학술대회, 2010.
- 유동일, 심현철, "초소형 비행체의 자동 편대 비행에 관한 연구," 추계항공우주학회, 2009.
- 김건홍, 정연득, 심현철, 박승오, "Shrouded Propeller 후류에 놓인 제어 베인의 공력 예측 및 측정," 추계항공우주학회, 2009.
- 오현동, 원대연, 탁민제, 심현철, "운동 구속조건을 고려한 영상정보 기반의 소형 무인기 자세 추정," 추계항공우주학회, 2009.
- 유동일, 심현철, "자동 비행을 위한 초소형 비행체 시스템 식별 및 오토파일럿 설계," 추계항공우주학회, 2009.
- 허성식, 유동일, 문상우, 윤선혜, 정연득, 이웅희, 심현철, "다수의 무인항공기 운용을 위한 소형 오토파일럿 및 지상관제시스템 개발," 추계항공우주학회, 2009.
- 정연득, 김건홍, 심현철, 박승오, "테일 시터 무인기의 수직 비행을 위한 자세제어기 설계," 추계항공우주학회, 2009.
- 문상우, 유동일, 심현철, 여홍태, 한재섭, "근거리 방제용 무인헬기의 경로 생성 알고리듬 및 자동제어 시스템 개발,"추계항공우주학회, 2009.
- 문상우, 심현철, "도심 환경에서의 도심 환경에서의 회전익 무인기에 대한 효과적인 궤적 생성 알고리듬 개발,"추계항공우주학회, 2009.
- D. I. You and D. H. Shim, "LMI-based Robust Auto-landing Controller Design Using Mixed H2/H infinity for Fixed wing UAV," 한국자동제어학술회의(KACC), 2009.
- 박봉균, 원대연, 탁민제, 심현철, "멀티카메라 시스템 기반 실내 소형비행체 자세 제어를 위한 다중 센서 융합 연구," 한국자동제어학술회의, 2009.
- 오현동, 원대연, 허성식, 안종선, 박봉균, 심현철, 탁민제, "멀티카메라 시스템을 이용한 실내용 무인 항공기 자세 추정," 2009 한국자동제어학술회의, 2009.
- 원대연, 오현동, 허성식, 박봉균, 안종선, 심현철, 탁민제, "멀티로터 방식 비행체 제어기법 연구를 위한 실내비행테스트 환경 개발," 제17회 지상무기학술대회, 2009.
- 김건홍, 정연득, 심현철, 박승오, "Tail Sitter 방식의 VTOL 무인 항공기의 예비 설계 ," 제 17회 지상무기 학술대회, 2009
- 유동일, 심현철, "자동비행을 위한 초소형 무인 비행체 개발," 춘계항공우주학회, 2009.
- 정연득, 김건홍, 심현철, 박승오, "Tail Sitter 방식의 VTOL 무인 항공기 형상 설계 및 모델링," 춘계항공우주학회, 2009.
- 허성식, 심현철, "에어백을 이용한 고정익 무인항공기의 영상기반 자동착륙 실험," 추계항공우주학회 , 2008
- 원대연, 허성식, 박봉균, 오현동, 심현철, 탁민제 (KAIST), "멀티카메라 시스템을 이용한 실내 소형무인기 테스트베드 예비 연구." 추계항공우주학회 , 2008
- 김건홍, 정연득, 심현철, 박승오, "Tail Sitter 방식의 VTOL 무인 항공기 형상 및 제어 시스템 설계 ," 제 16 회 지상무기 학술대회 , 2008
- 심현철, 허성식, "다목적 소형 무인 헬리콥터의 개발," 춘계항공우주학회 , 2008
- 허성식, 심현철, "에어백을 이용한 고정익 무인항공기의 영상기반 자동착륙 연구," 춘계항공우주학회 , 2008
- 김태규, 심현철, 권세진, "연료전지를 동력장치로 하는 Blended Wing-Body UAV ," 한국항공우주공학회 춘계학술대회, 2007. 4. 12-13.
- 김태규, 심현철, 권세진, " 무인항공기용 연료전지 동력 시스템 개발," 한국추진공학회 춘계학술대회, 2007. 4. 26-27.
- 김태규, 심현철, 권세진, " 무인항공기 동력원을 위한 소형 연료 전지 시스템," 한국정밀공학회 춘계학술대회, 2007. 6. 21-22.
- 김태규, 심현철, 권세진, " 무인기 동력원을 위한 연료전지 시스템의 설계 및 성능시험," 한국군사과학기술학회 종합학술대회, 2007. 8. 16-17.
- 탁민제, 민병문, 심현철, "t_go 다항식 유도법칙에 관한 연구," 2007항공우주학회춘계학술발표회
- 심현철, 탁민제, "시가지 환경에서 UAV의 완전분산형 군집비행제어 기법," 항공우주학회 춘계학술 발표회, 2007.
- 김광연, 김윤환, 탁민제, 심현철, "확률적 방법을 이용한 무인항공기 충돌회피," 항공우주학회 춘계학술 발표회, 2007.
- 심현철, 김현진, "무인 헬기를 위한 비선형 모델 예측 방법," 추계항공우주학회 , 2004
- 박현식, 심현철, 이은호, 이교일, "디지탈 LQG-LTR 제어기법에 의한 모형 헬리콥터의 정지비행 제어 (Hovering Flight Control for a Model Helicopter using digital LQG/LTR theory)," 대한기계학회 춘추학술대회, 1993, 1.
- 심현철, 이은호, 이교일, "모형 헬리콥터의 정지비행 제어기의 설계 (Design of Hovering Flight Controller for a Model Helicopter)," 대한기계학회 춘추학술대회, 1992, 1.
Patents
- Hyunki Seong, Chanyoung Jung, Seungwook Lee, David Hyunchul Shim, "Autonomous driving device", App.No.17/937,733(2023.05.18), United States
- 심현철, 이대규, 강규리, "다층 건물 환경에서의 그래프 기반 통합 경로 계획 방법 및 장치", App.No.10-2022-0135857(2022.10.20), 대한민국
- David Hyunchul Shim, Daegyu Lee, Hyungi Kim, "Method and system for building lane-level map by using 3D point cloud map", App.No.17827844(2022.05.30), United States
- 심현철, 성현기, 이승욱, 정찬영 "자율 주행 장치", App.No.10-2021-0157644(2021.11.16), 대한민국
- 심현철, 이대규, 김현지, "3차원 포인트 클라우드 맵을 이용한 차선 레벨 지도 구축 방법 및 시스템", App.No.10-2021-0119872(2021.09.08), 대한민국
- 이병성, 박진선, 신욱철, 심규민, 이대규, 정찬영, 권인소, 김준혁, 문상근, 심현철, "배전 설비 영상 취득 시스템 및 방법", App.No.10-2020-0081025(2020.07.07), 대한민국
- Shim, David Hyunchul, Lee Jae Hyun, Lee Han Seob, "Image Processing-Based Collision Avoidance System for Flight Vehicle and Flight Vehicle Including Same", App.No.16805240(2020.02.28), United States
- 심현철, 이재현, "영상 처리를 기반으로 한 비행체의 충돌 방지 시스템 및 이를 포함하는 비행체", App.No.10-2019-0023834(2019.02.28), 대한민국
- 심현철, 이재현, 이한섭, "영상 처리를 기반으로 한 비행체의 충돌 방지 방법",등 App.No.10-2019-0023835(2019.02.28), Pat.No.10-2171043-0000(2020.10.22), 대한민국
- 심현철, 조성욱, 이웅희, 신희민, 정지원, 이다솔, "물류배송방법", App.No.10-2017-0090943(2017.07.18), Pat.No.10-1917194-0000(2018.11.05), 대한민국
- 김상현, 문건희, 최한림, 심현철, "인공위성 근접운용 시뮬레이터", App.No.C-2017-017389(2017.07.04), Pat.No.C-2017-017389(2017.07.04), 대한민국
- 심현철, 허성식, 신희민, "교량 내부 진단 시스템", App.No.10-2014-0107640(2014.08.19), 대한민국
- 심현철, 윤상열, 이웅희, "속도 프로파일 생성장치 및 생성방법", App.No.10-2014-0036155(2014.03.27), Pat.No.10-1562895-0000(2015.10.19), 대한민국
- 심현철, 김종혁, 허성식, "2D 레이저 스캐너와 회전수단 및 전방향 고정 카메라를 이용한 3차원 정보 제공 장치", App.No.10-2013-0106702(2013.09.05), 대한민국
- 심현철, 허성식, 이성기, "마커 장갑의 움직임을 3차원으로 인식하는 카메라 기반 원격조정 장치로 자원 개발 로봇을 구동하는 시스템", App.No.10-2011-0093226(2011.09.16), Pat.No.10-1216065-0000(2012.12.20), 대한민국
- "물류배송방법", 등록번호 10-2017-0090943, 등록일 2018년 11월 05일.
- "인공위성 근접운용 시뮬레이터", 국가 R&D 소프트웨어 성과물, 등록번호 C-2017-017389, 등록일 2017년 07월 25일.
Project list
-
KETI: 초실감 문화콘텐츠 체험을 위한 텔레프레즌스 Robo-VFX 서비스 플랫폼 기술 개발 (2024-2026)
- 모바일 매니퓰레이터를 활용한 텔레프레즌스 구현
- 모바일 매니퓰레이터의 실내환경 충돌 회피 경로 생성 및 제어
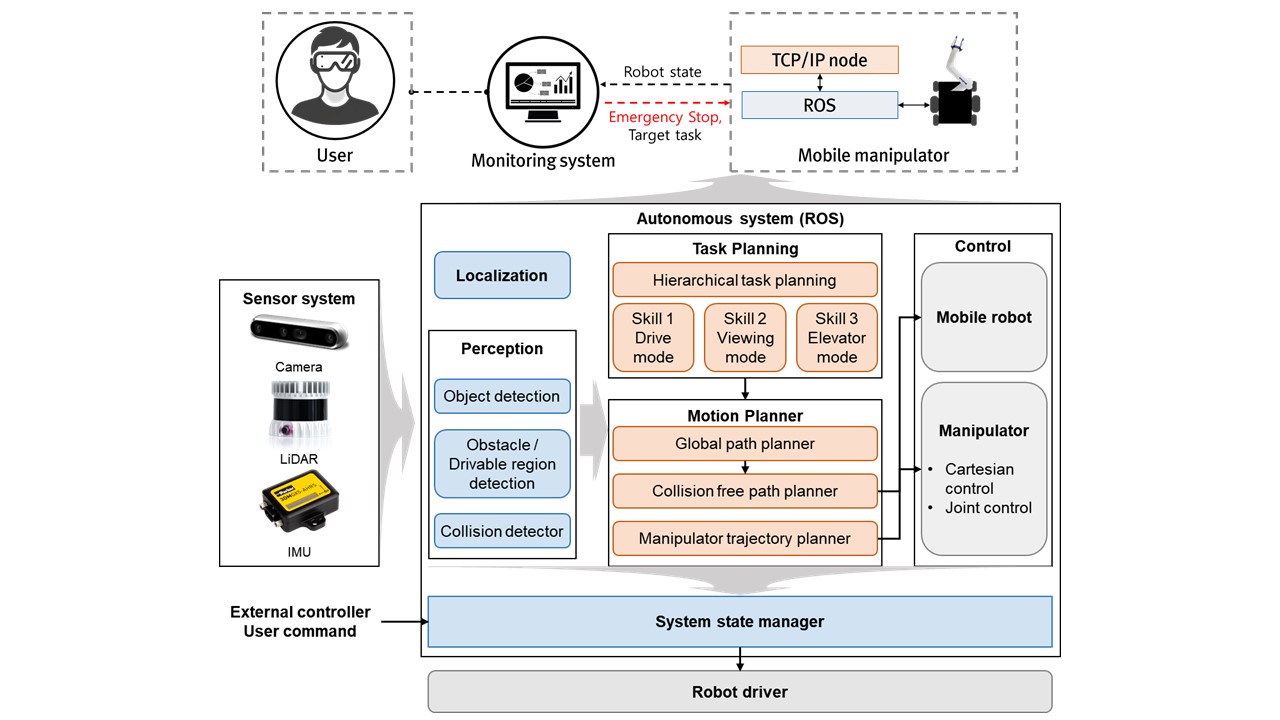
-
ADD: 유인 운용 내부제독 시스템 (2024-2026)
- 화학 작용제가 존재하는 실내환경에서 드론과 로봇을 활용하여 정찰 및 오염지도 생성
- 드론-로봇 협업 시스템을 활용한 오염된 실내환경 자율 제독 시스템 구축
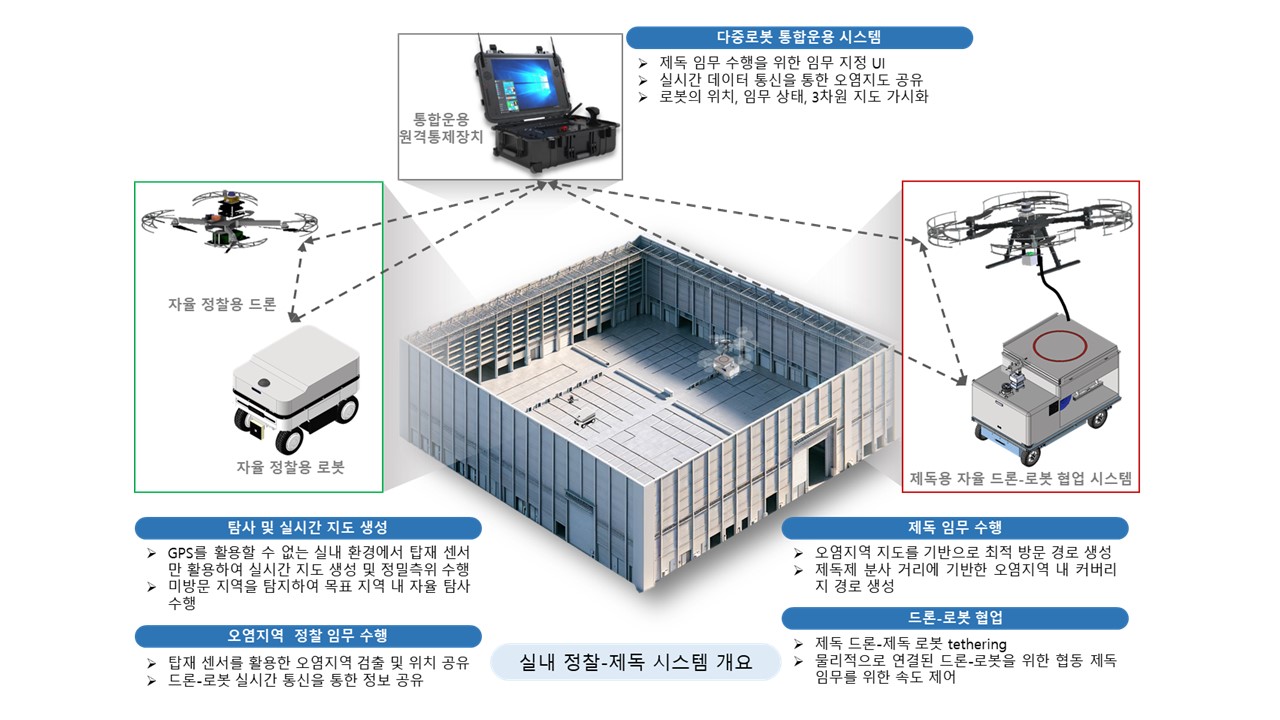
-
현대자동차: 고성능EV 서킷 주행 성능 향상을 위한 액티브 에어로 벡터링 시스템 개발 (2024-2025)
- 고성능 전기차의 서킷 주행 성능 향상을 위한 공력 제어 시스템 개발
- 차량 모델 기반의 4-코너 독립 공력 제어 알고리즘 개발 및 레이싱 트랙 실증
- MPC를 활용한 공력 제어 시스템의 응답 지연 보상
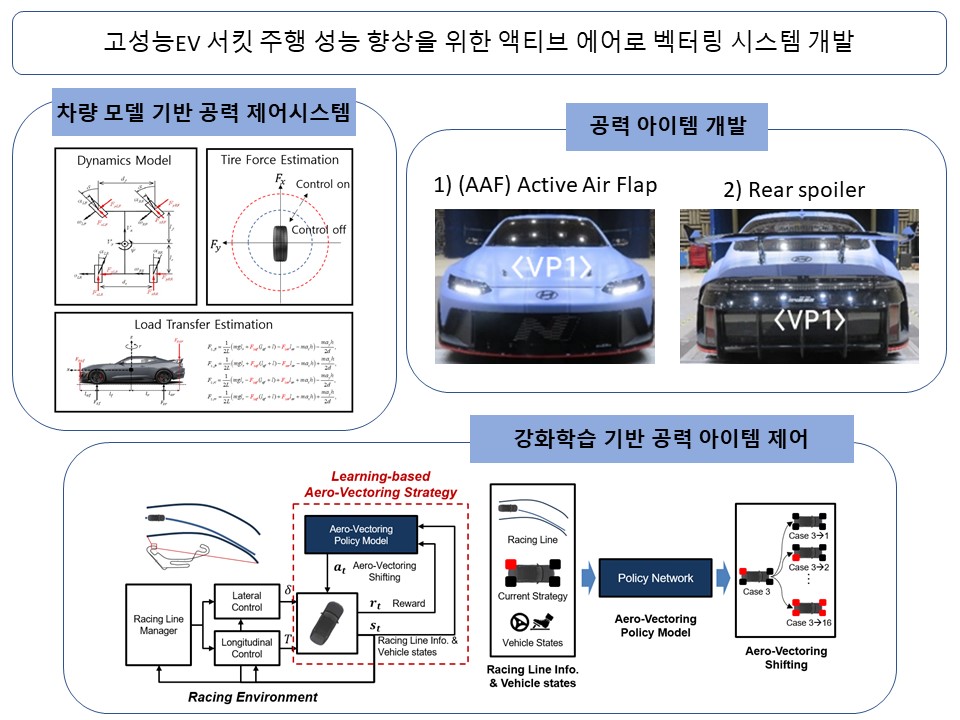
-
현대자동차: PnD (Plug and Drive) 모듈 다양화 및 표준화 개발 (2024 - 2025)
- 실내 복잡 환경(공장 환경 등)에 적용가능한 실내 정밀 측위 및 자율주행 기술 개발
- 자동화 시스템 운용을 위한 하드웨어, 소프트웨어 아키텍처 개발
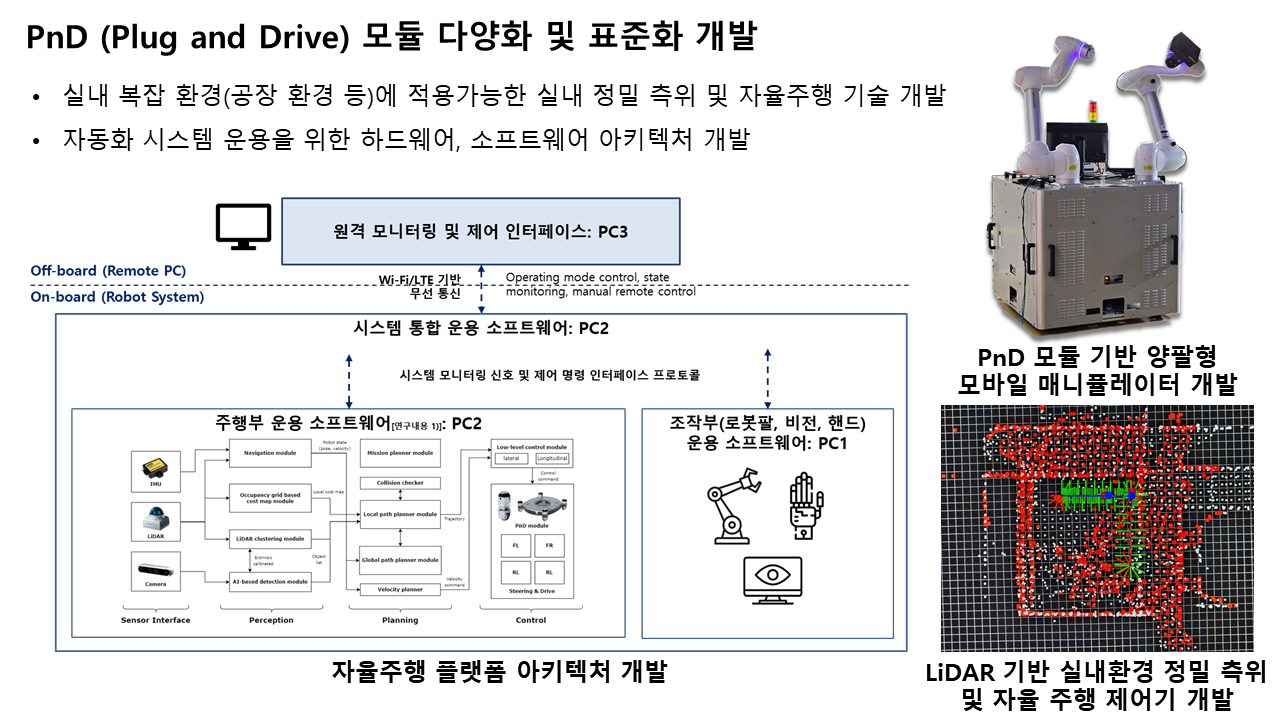
-
현대자동차: 심층강화학습을 활용한 자율 주행 알고리즘 및 Sim2Real 기법 연구 (2024)
- 모방학습 및 강화학습 기법을 복합적으로 활용하여 Sim-to-real gap이 적은 정책 모델 학습 기법 개발
- Transformer 구조 기반 자율 주행 정책 모델 설계
- 실 환경에서의 실험을 통한 학습 모델의 Sim-to-real 성능 검증
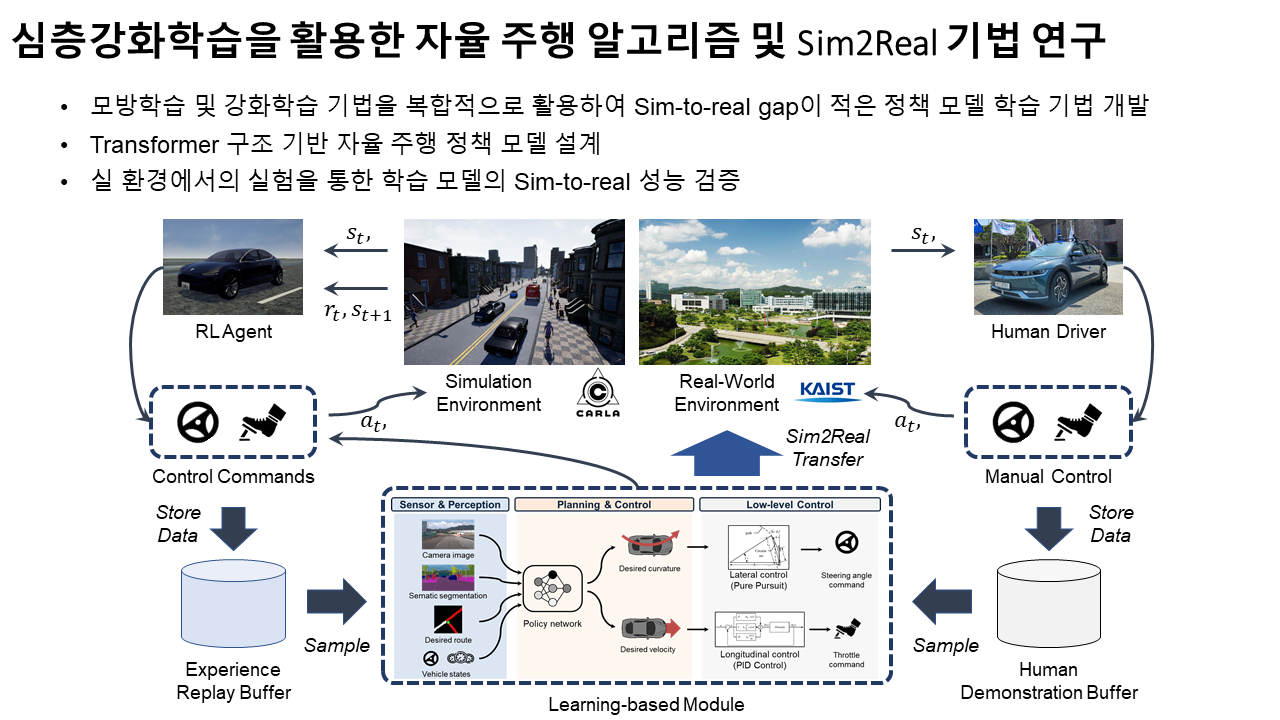
-
KRM: 건물 및 지하 공동 탐색을 위한 로봇 자율주행 기술 개발 (2024)
- LiDAR 기반 3차원 위치 추정 알고리즘 개발
- 동적 및 정적 장애물 회피 알고리즘 개발
- 효율적인 탐사 알고리즘 개발
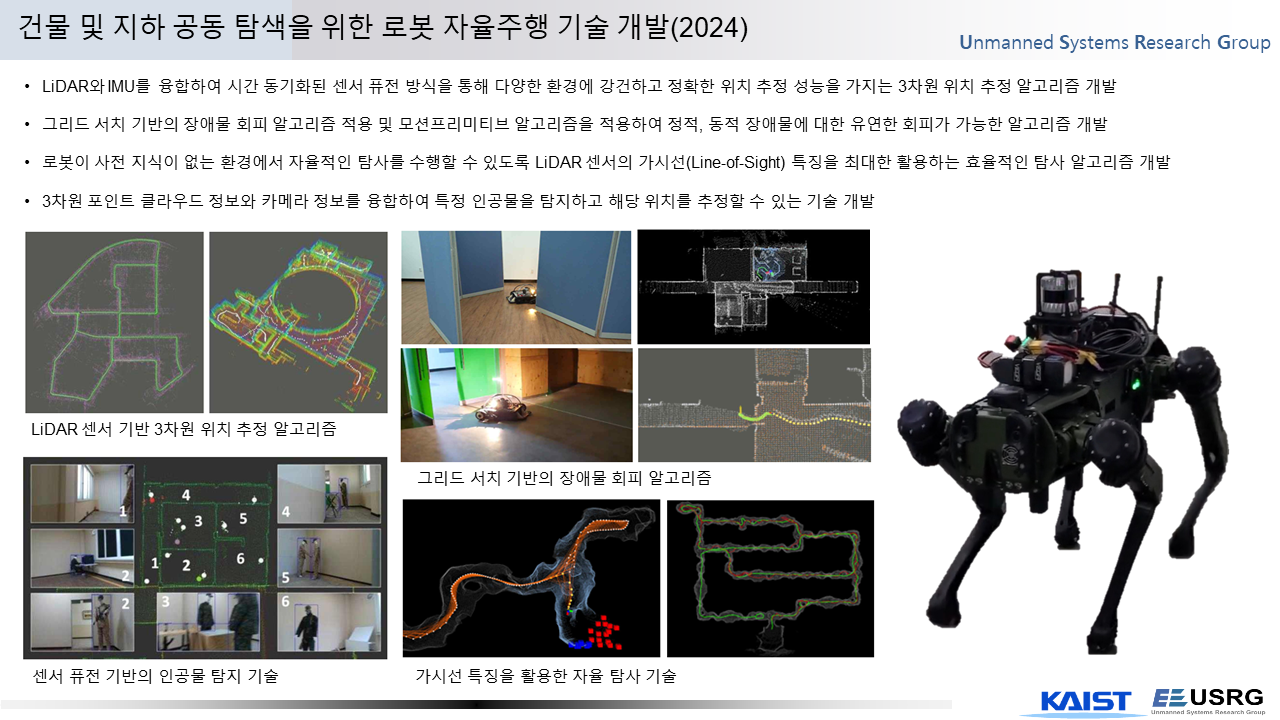
-
ETRI: 드론-로봇 연계 도심지 최대중량 40kg 화물 멀티모달 배송 기술 개발 (2023 - 2026)
- 드론 연계 실내외 도심환경 자율주행 배송 기술 개발
- 다중 로봇 동시 운용 기술 고도화
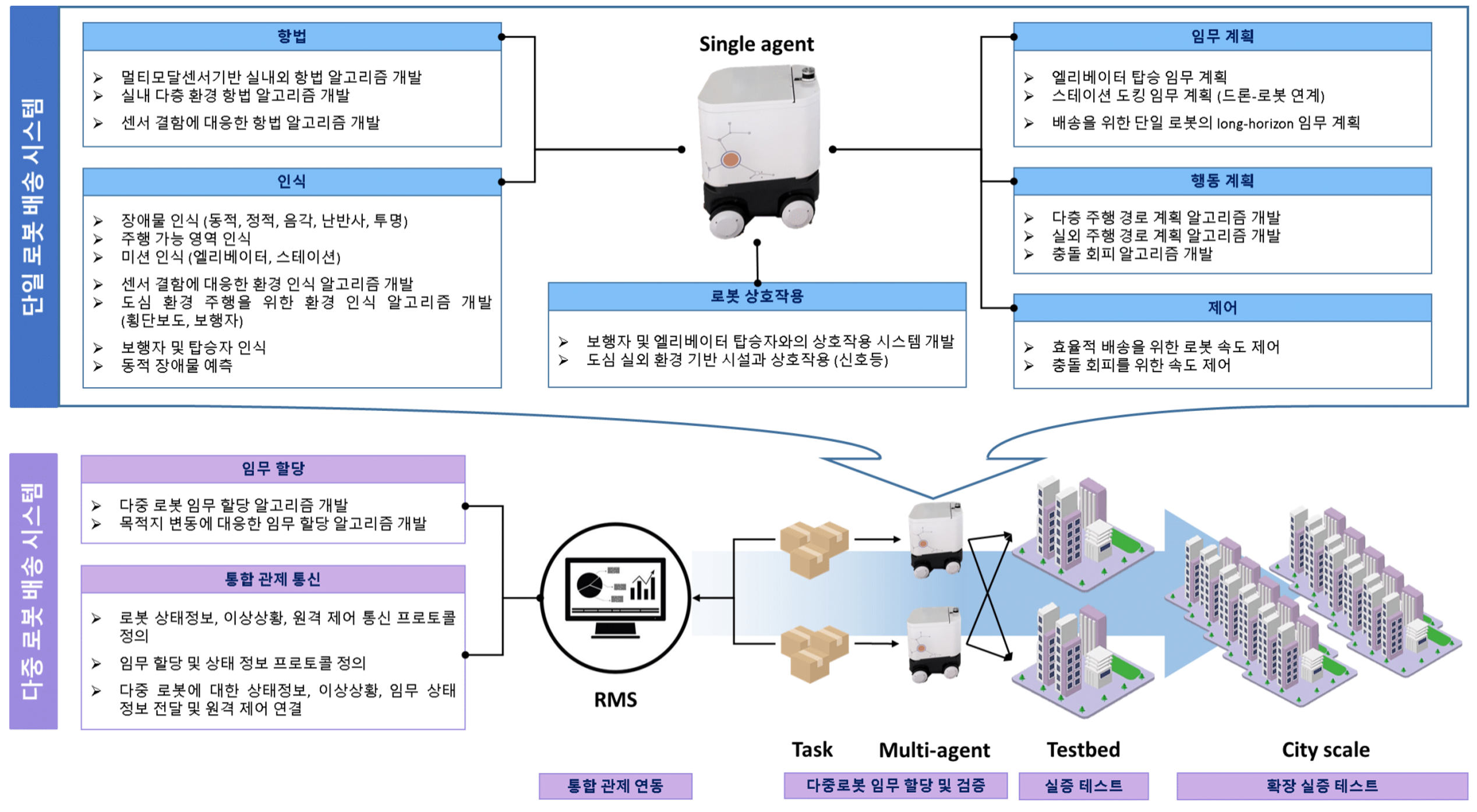
-
불법드론 지능형 대응기술개발사업 - 드론캅 기체/요소기술 및 운용시스템 개발(2021-2025)
- 불법드론에 대한 지능형 무력화가 가능한 신속대응형 드론 개발
- 초도 탐지 기술 및 불법드론에 대한 상시순찰형 드론 개발
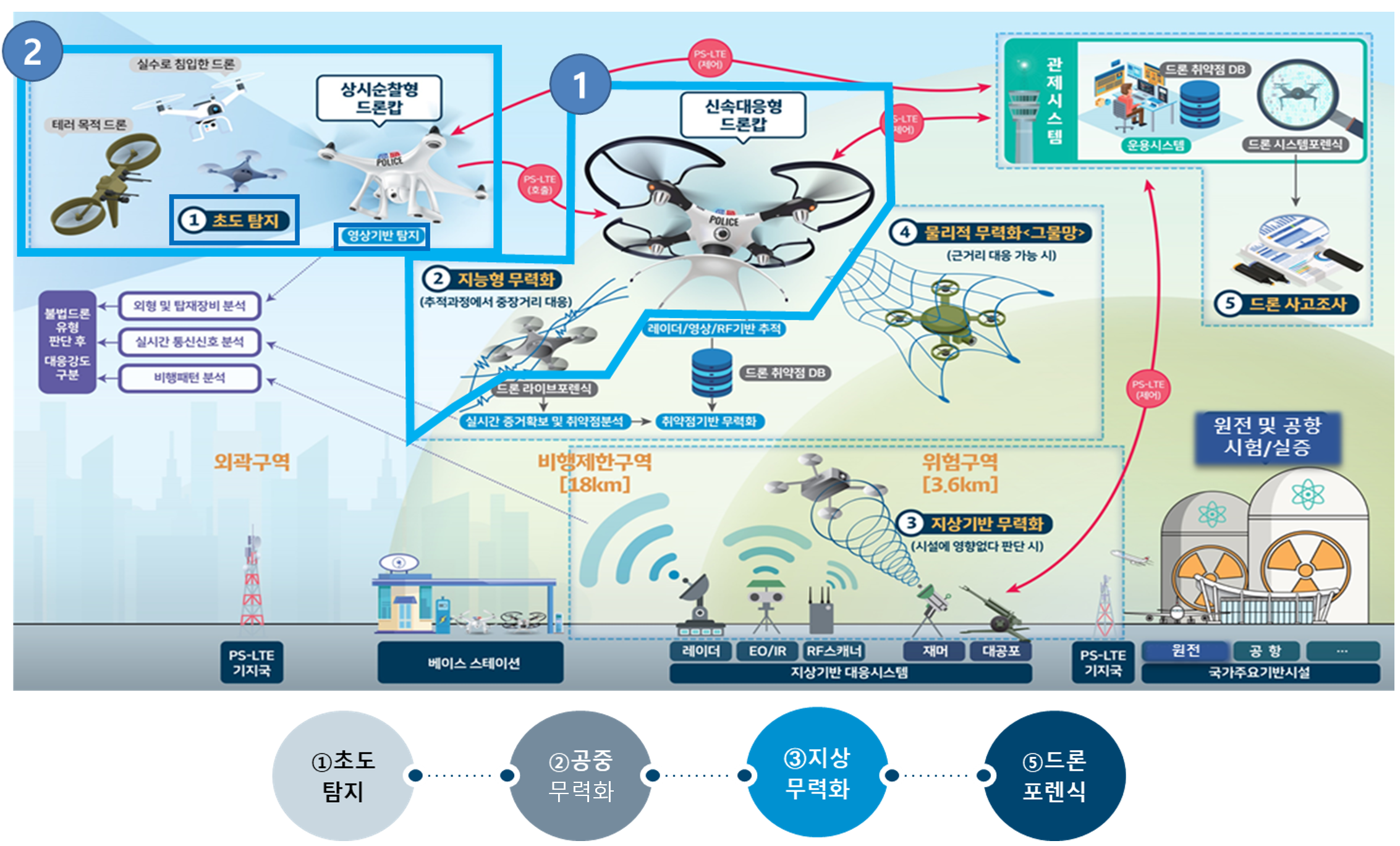
-
무인이동체 보안을 위한 항재밍 및 무허가 무인이동체 탐지대응 기술 개발(2023-2026)
- Robot Operating System을 이용한 융합센서 운용/임무제어 시스템 개발
- 대상 수신기의 GPS 신호 끊김없이 스푸핑이 가능한 GPS soft 스푸핑 신호 생성 SW
- 드론의 회전, 직진 및 선회 기동성을 활용한 방탐 및 위치 추적
- 융합센서/재머 탑재한 드론 구성
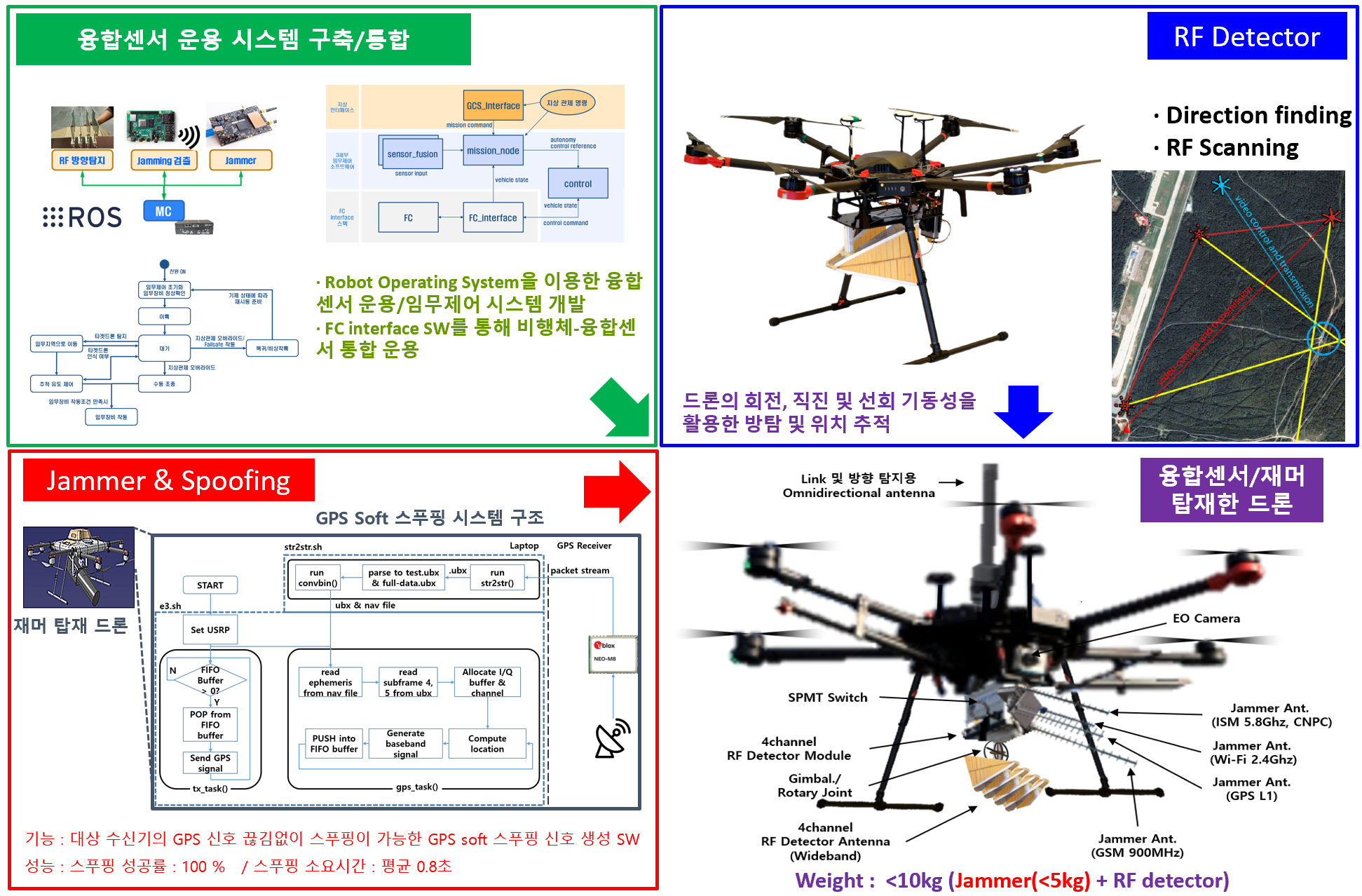
-
다중로봇의 임무수행을 위한 end-to-end 강화학습 모델 프로토타입 연구 (2023-2024)
- 다중 에이전트를 위한 표준 인터페이스 학습 프레임워크 구축
- 다중 에이전트 강화학습 모델 프로토타입 개발
- 검증용 시나리오를 통한 다중 에이전트 모델 효용성 확인
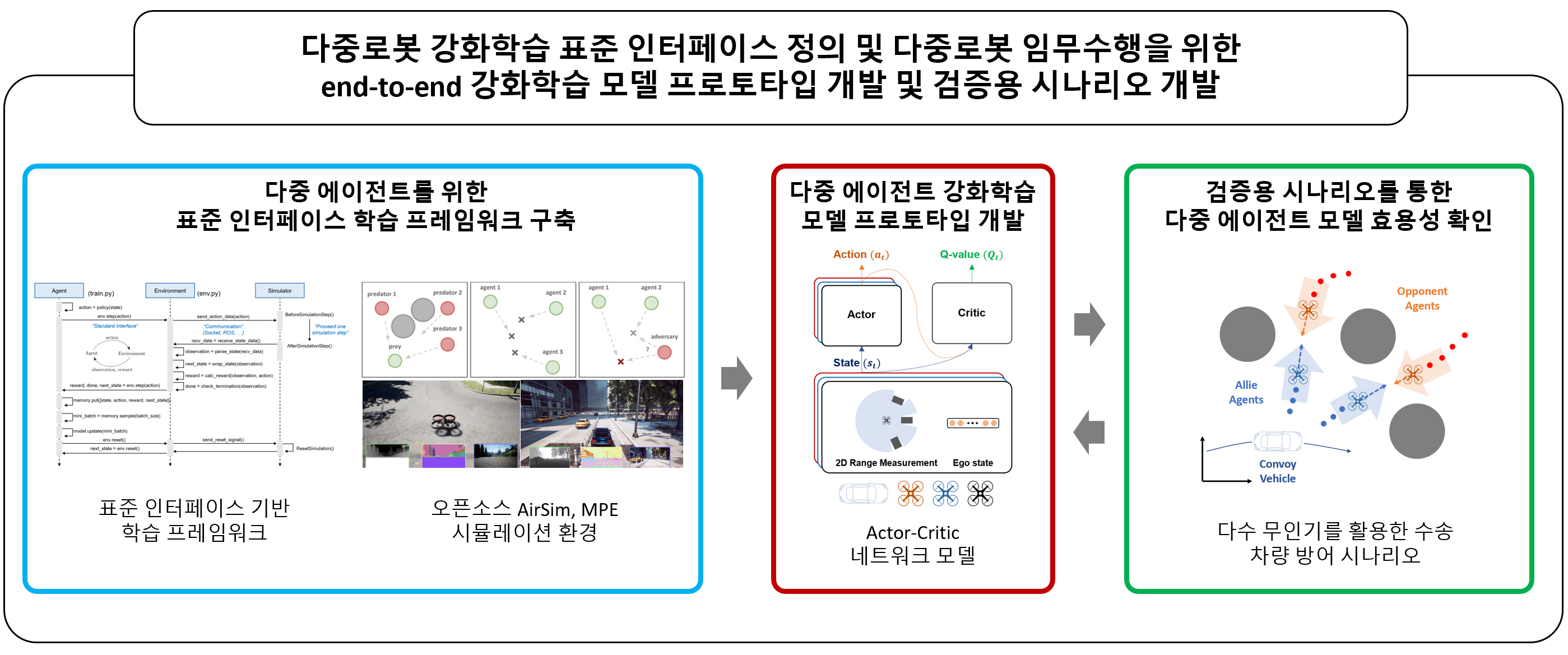
-
자연어 처리 지식베이스 기반 인간형 조종사 로봇 개발 (2022-2026)
- 항공기 운항에 전단계{Taxing, Takeoff, Cruise, Landing, Emergency situation}에 대응 가능한 인간형 로봇 조종사 개발
- 자연어 조종 매뉴얼을 학습하여 지식베이스화, 이를 바탕으로 추론, 상황에 적합한 행동을 직접 판단하는 Intelligent Robot System 구현

-
배송로봇 경로계획 및 플랫폼 제어 모듈 개발 (2022)
- 실내 환경에서 주변 환경 인식률을 향상하기 위한 센서 융합 기반의 인식 알고리즘 활용
- 다층 환경에서의 경로 계획을 위한 통합형 정밀 지도 구축 및 항법 수행
- 팔레타이징 로봇 연계 인터페이스 및 도킹 알고리즘
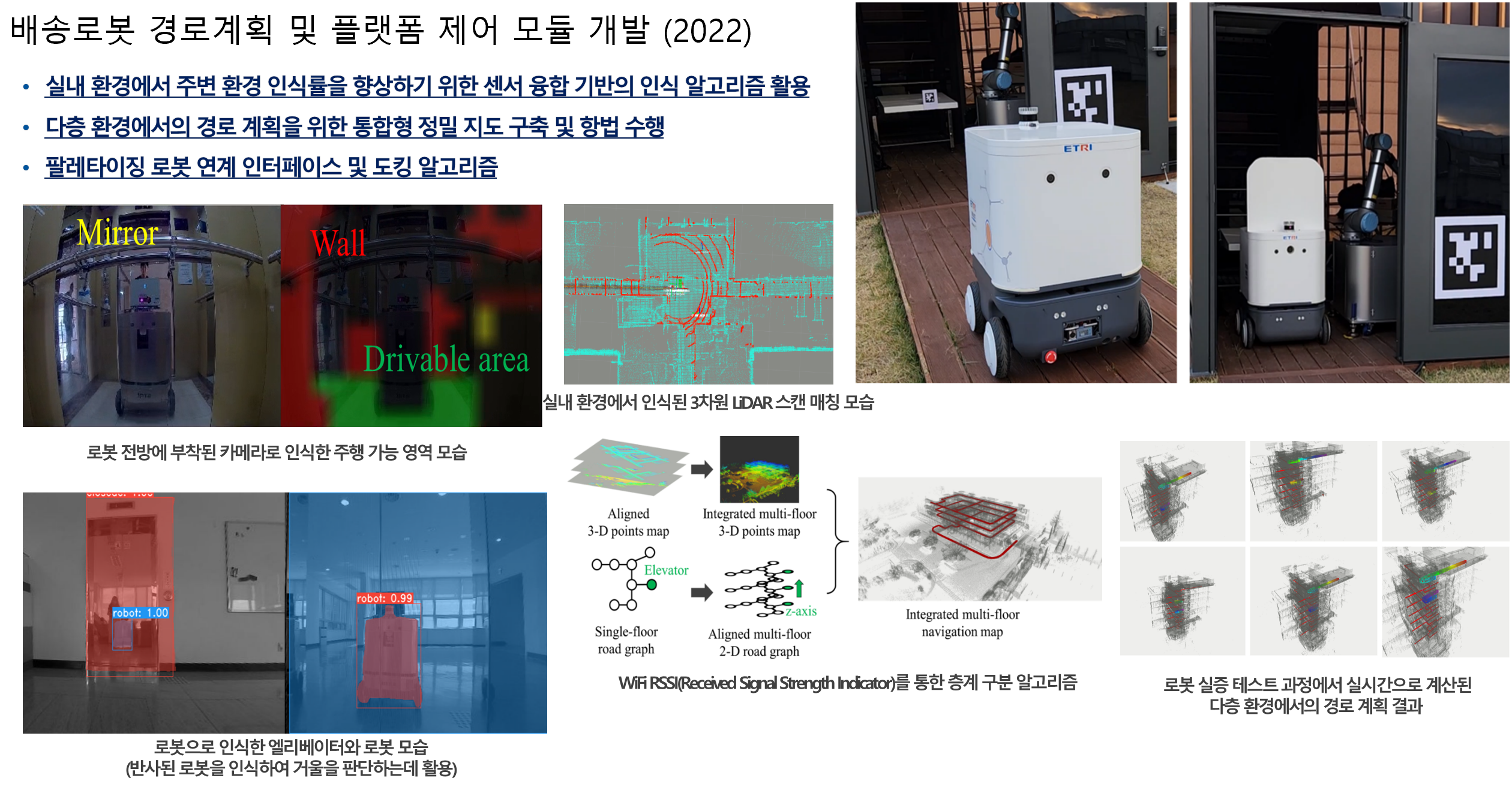
-
비정형 실내 환경 자율주행을 위한 모바일 매니퓰레이터 시스템 개발 (2021)
- 자율주행 로봇에 탑재된 매니퓰레이터를 이용해 실내환경에서 문, 엘리베이터 같은 시설물을 스스로 통과하는 시스템 개발
- 비정형 실내 환경에서 자율주행 로봇의 자율성 고도화
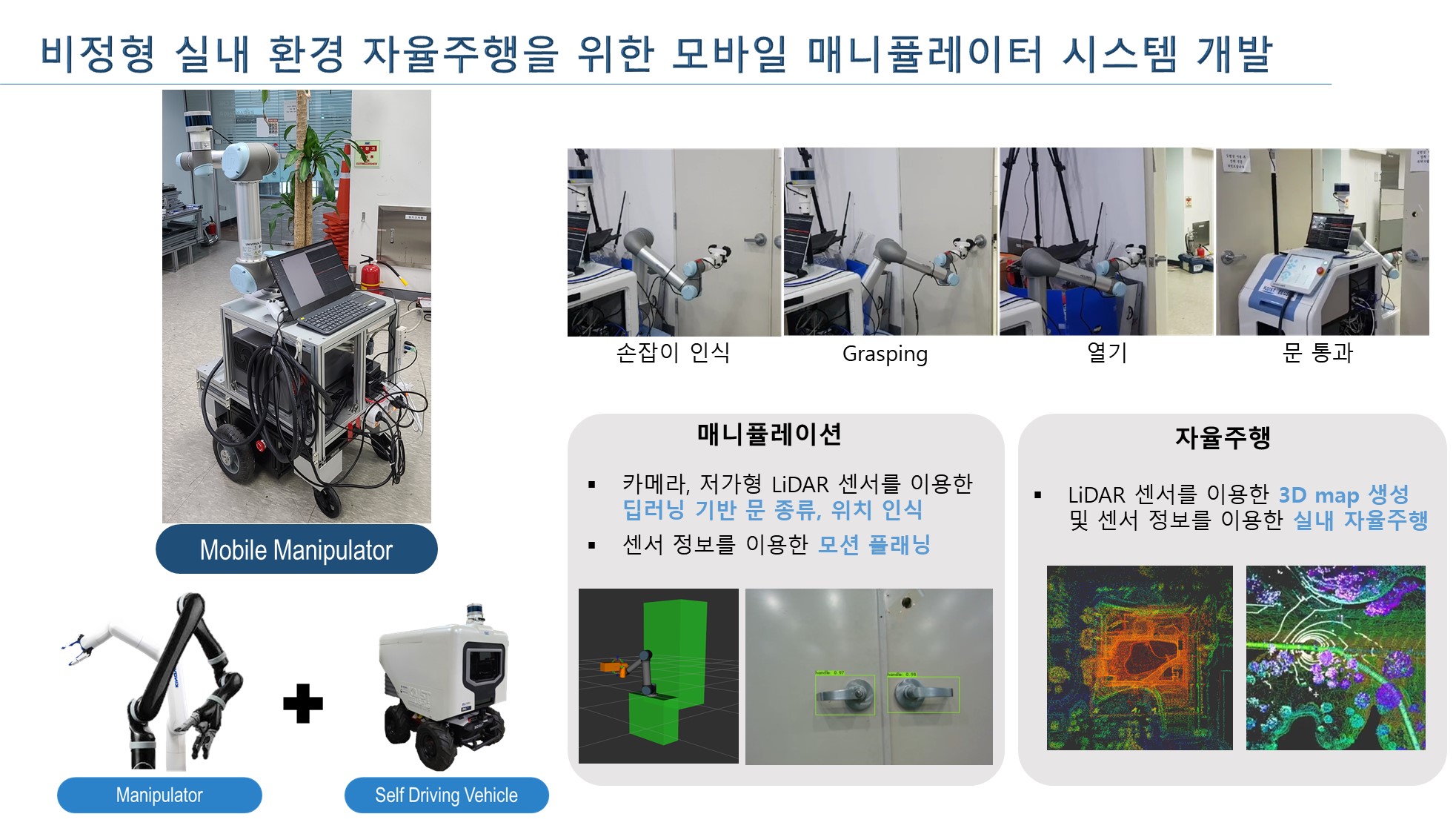
-
무인전투기 자율 공중교전을 위한 강화학습 기반 알고리즘 개발 (2021-23)
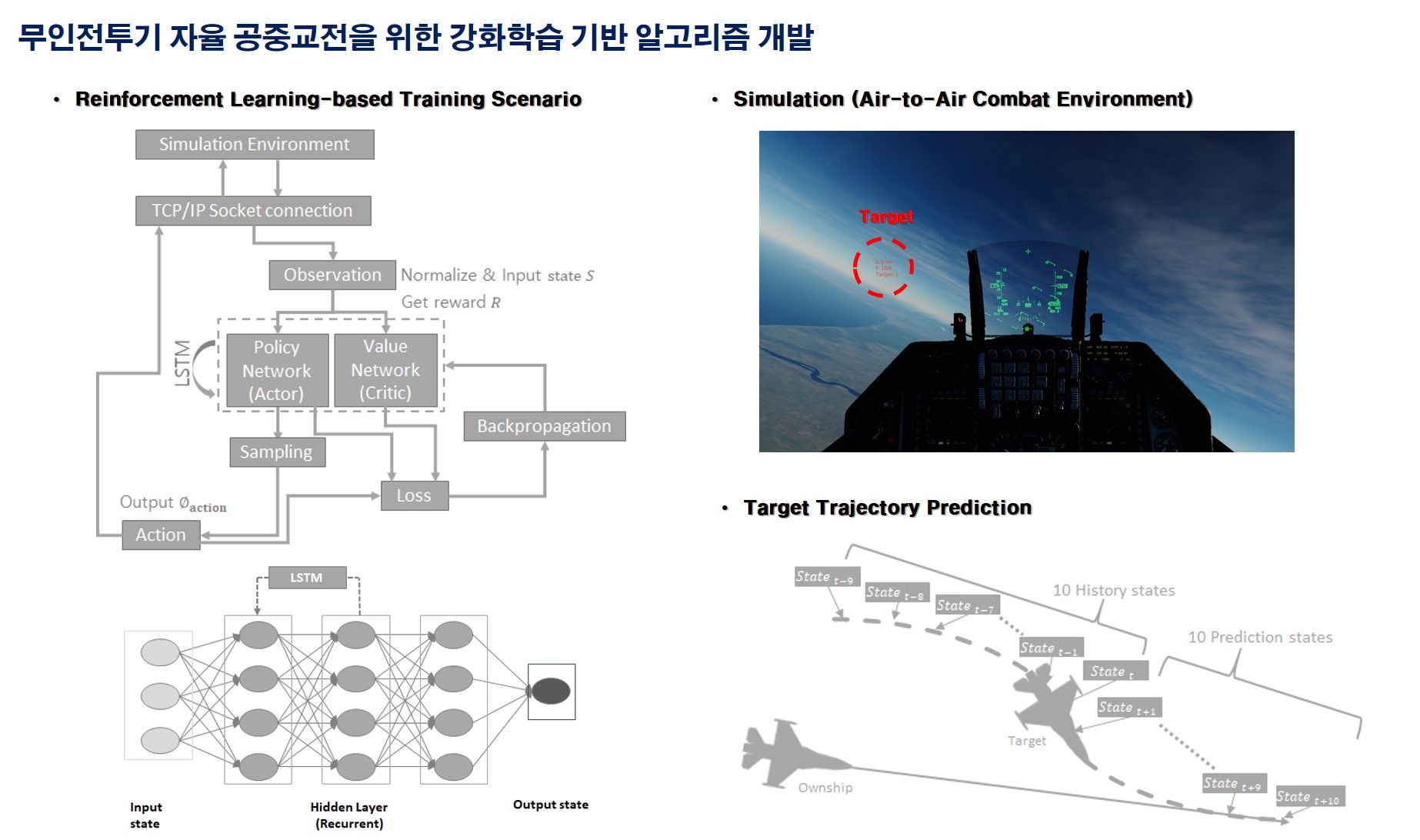
-
도심형 주소기반 자율주행 실증 배달로봇(2020-21)
도심 환경에서 배달을 수행할 수 있는 자율주행 로봇을 만드는 프로젝트입니다. 복잡한 환경에서도 안정적으로 주행하기 위해 지형 정보를 이용하는 node-link 개념을 활용하여 로봇이 목적지까지 안전하고 빠르게 도달할 수 있습니다. 주변 환경을 인식하는 다양한 센서의 조합을 통해 도심 환경에서도 강건한 항법 알고리즘을 개발하고 있습니다.
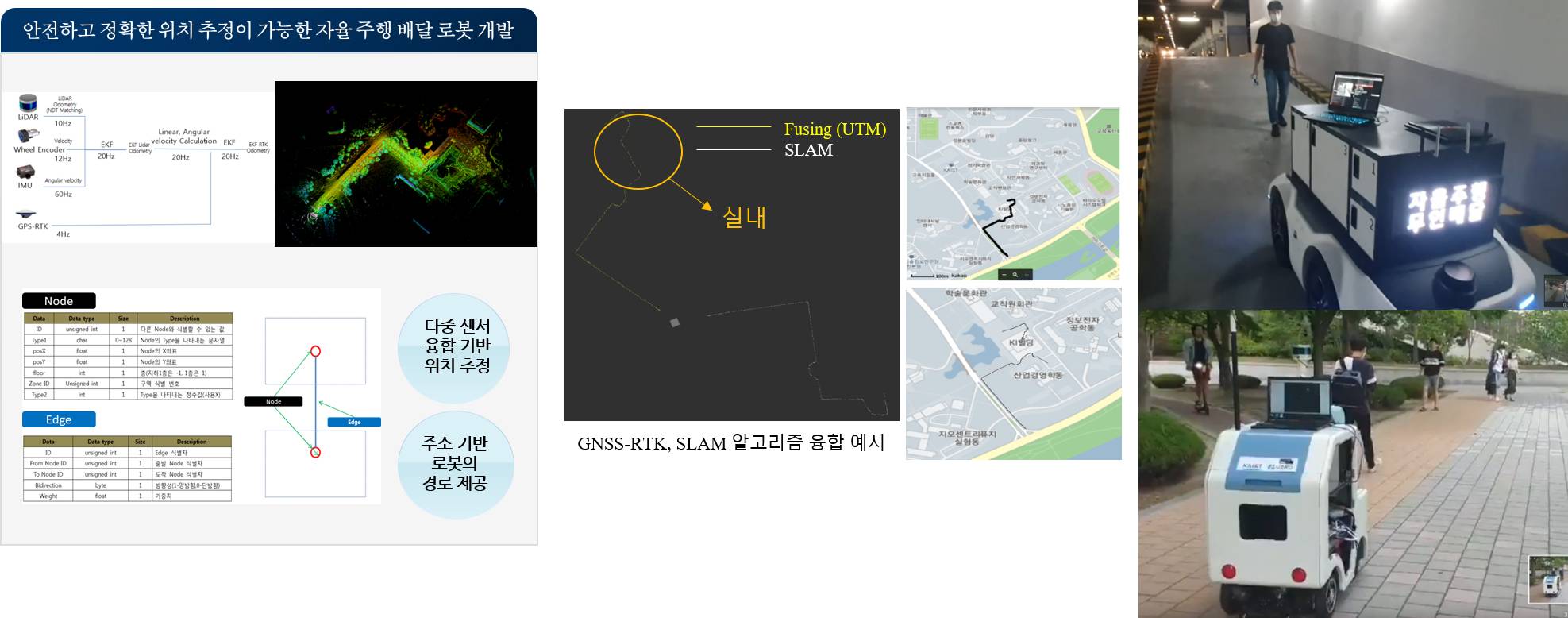
-
Autonomous Drone Navigation based on Vision and AI(2019-2022)
Hyperparameters significantly affect the intelligent robotic system performance. However, the explicit relationship between them is not known (Blackbox). The system evaluation can be done only by sampling, which is usually expensive. The objective is to find the systematic way to ease the system optimization.
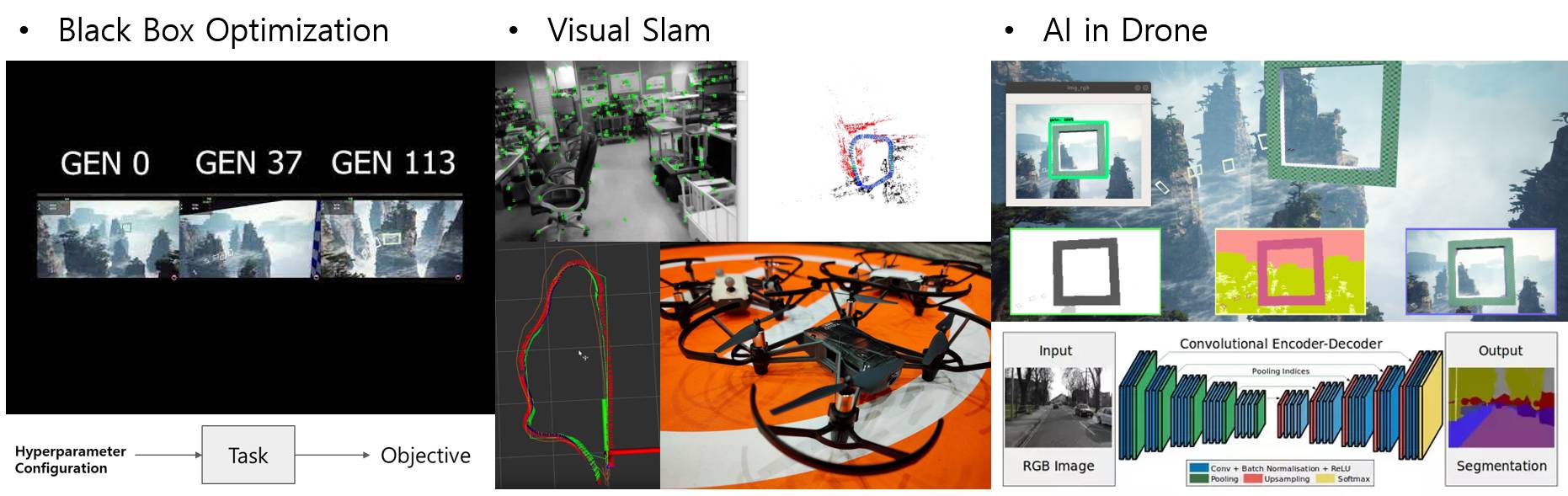
-
Detection, Tracking and Prediction for Autonomous Cars (2019-20)
라이다를 이용한 Detection, Tracking and Prediction
- 딥러닝을 이용한 물체 인식, 추종(tracking-by-detection)
- Convolutional GRU를 이용해 타 차량의 궤적 예측
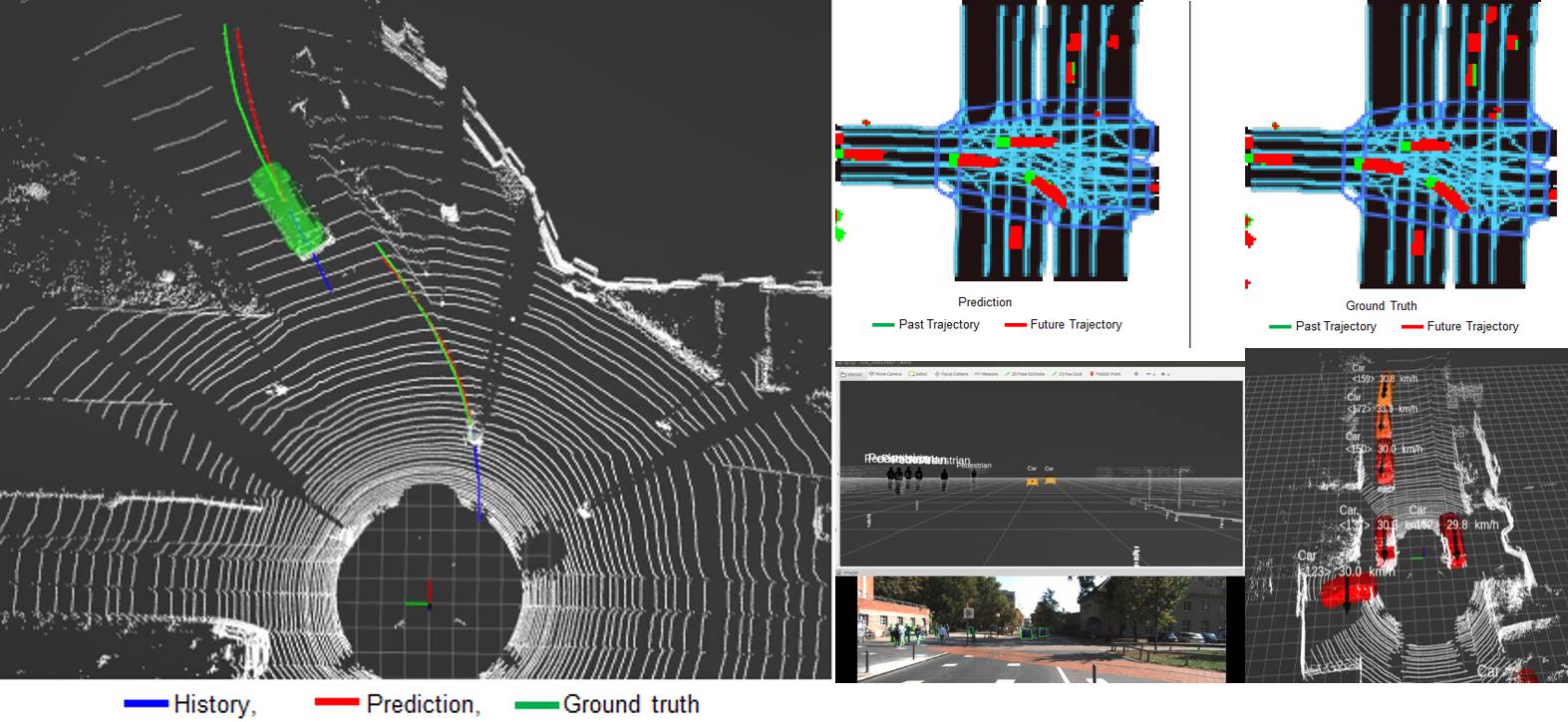
-
ROS 기반 AGV 자율주행 알고리즘 개발 및 적용 (2019 & 2021)
생산 현장에서 적용 가능한 자율주행 로봇의 알고리즘 개발 및 적용
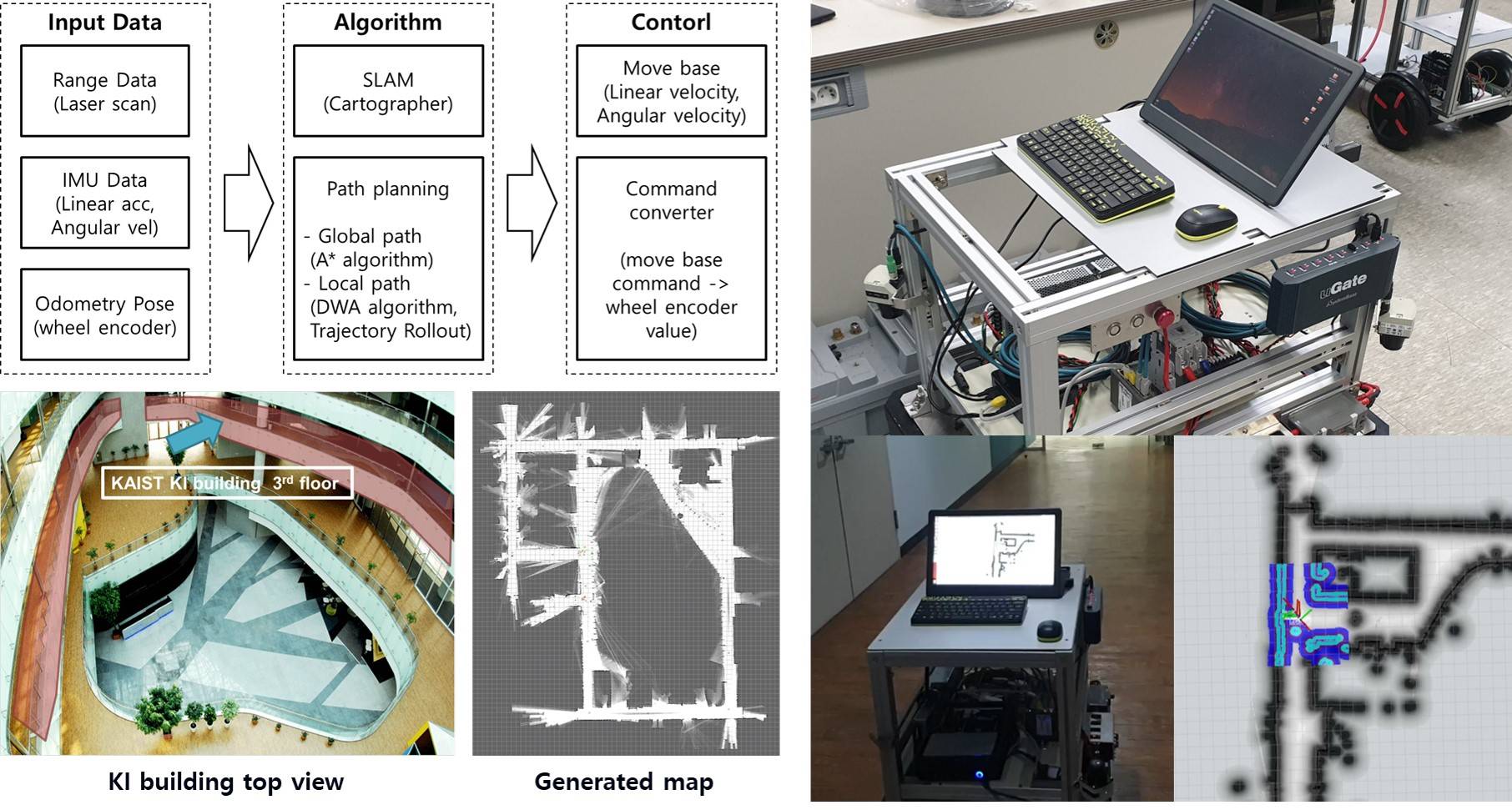
-
한국전력 영상 인식기반 배전설비 상태 추론 및 운영관리기술 개발 (2018-20)
도로 환경의 주변 전력장치 검진 시스템 개발
- 차량 시스템을 위한 전력 시스템 설계
- 센서 시스템 개발
- 시스템 Monitoring을 위한 HMI 개발

-
SK hynix KAIST 차세대 인공지능 반도체 시스템 연구센터 산하 자율 주행 시스템 개발 (2019-21)
전자과 내 인공지능 연구실과 함께 클러스터로 구성되어 자율주행 구현을 담당, 도심 자율 주행을 위한 인공지능 기술 기반 알고리즘 개발 및 자율 주행 시스템 개발

-
미니트램 자율주행 확장기능을 위한 센서융합기반 주행로 상황인식기술개발 (2018)
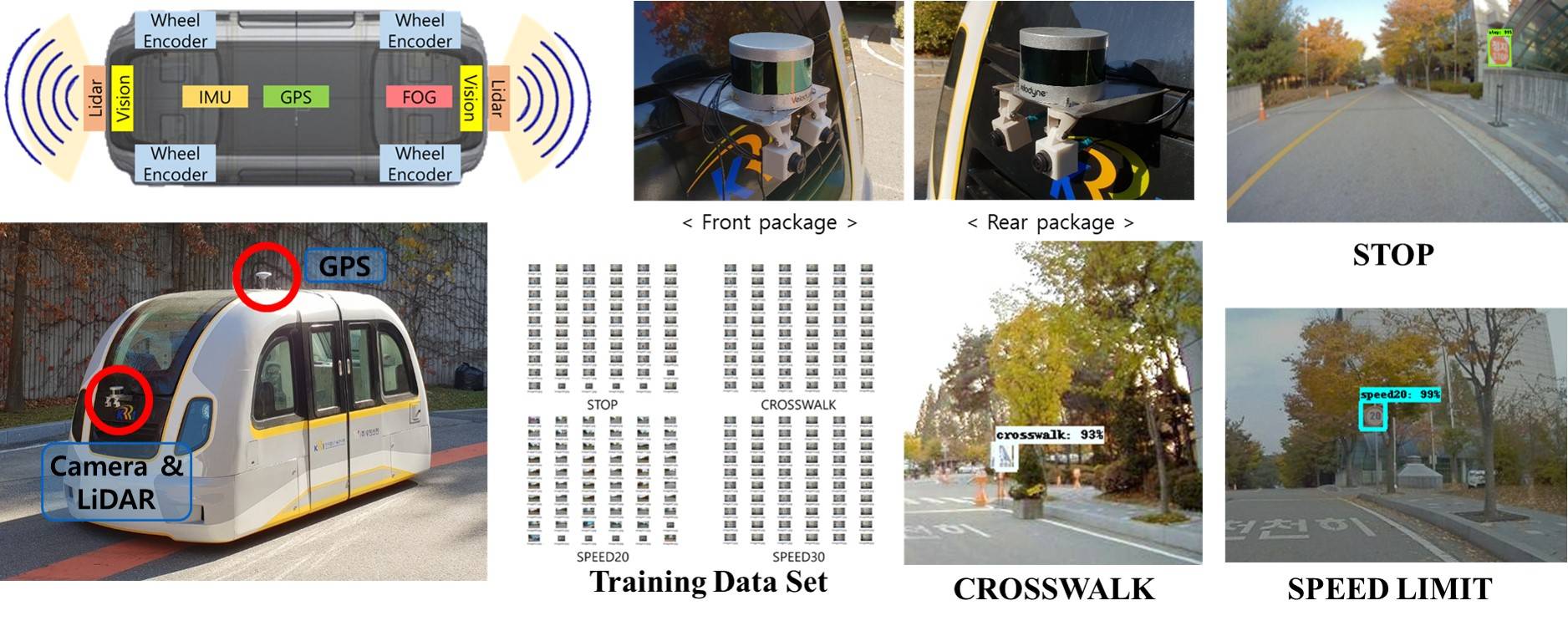
-
Flight Safety Regulation Development and Integrated Operation Demonstration for Civil RPAS (2015-21)
While there are impending explosive demands, in order to safely integrate unmanned aerial vehicles into civil airspace, - Prepare critical infrastructure for basic operation of civil RPAS - Collect flight data of RPAS under various experiment conditions using the aforementioned infrastructure, - Analyze the collected data to draft flight safety regulations, certification process, and operation procedures By executing the procedures listed above, our nation can be prepared for the impending era of civil RPAS and participate in the ICAO RPAS rule making process as a leading country based on the research results generated from the domestic RPAS operation.
This project is funding by Ministry of Land, Infrastructure, and Transport from 2016.
-
Development of a core technology and infra technology for the operation of USV with high reliability
The objective of this project is establishment of the USV(Unmanned Surface Vehicle) certification system and regulation for the operation of USVs in Korean waters and development of cooperative technology for multiple heterogeneous unmanned vehicles(USV and UAV) and technology for their maritime application services
This project is funded by the Ministry of Oceans and Fisheries from 2015.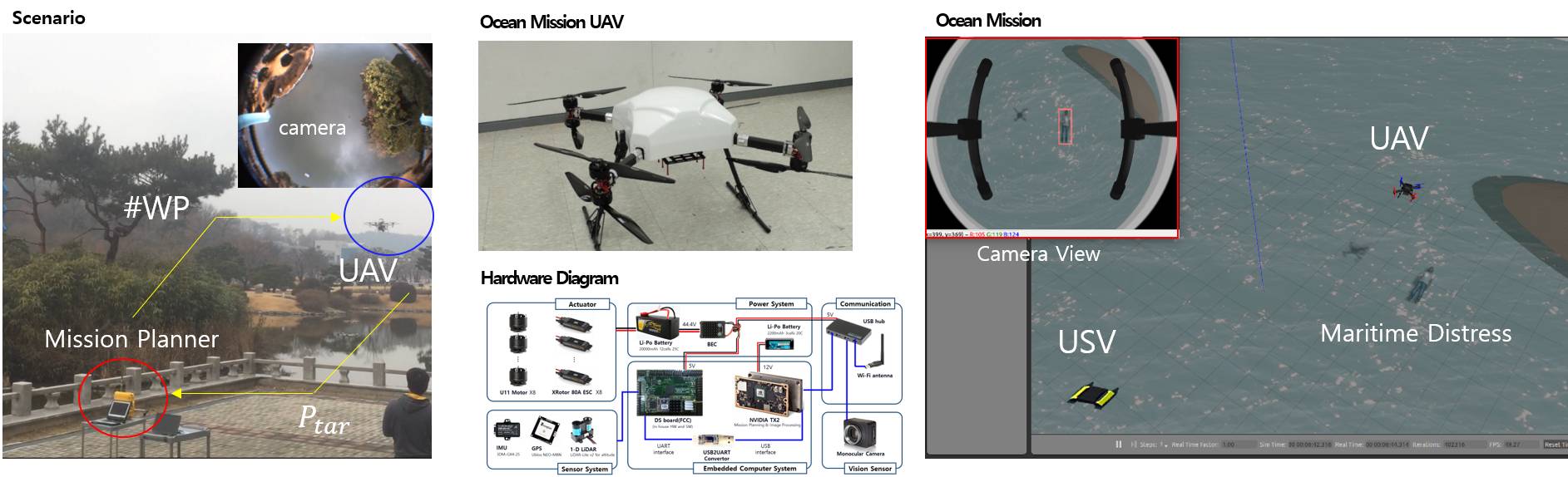
-
Development of smart drones system based on safe and convenient ICT
The objective of this project is that we develop the smart drone. Smart drone can be used in a variety of fields related with safety and convenient service by using ICT technology. Especially, Our research lab develop the vision-based automatic landing, fault tolerant controller algorithms for the rotary UAV.
This project is funding by Ministry of Trade, Industry and Energy from 2016.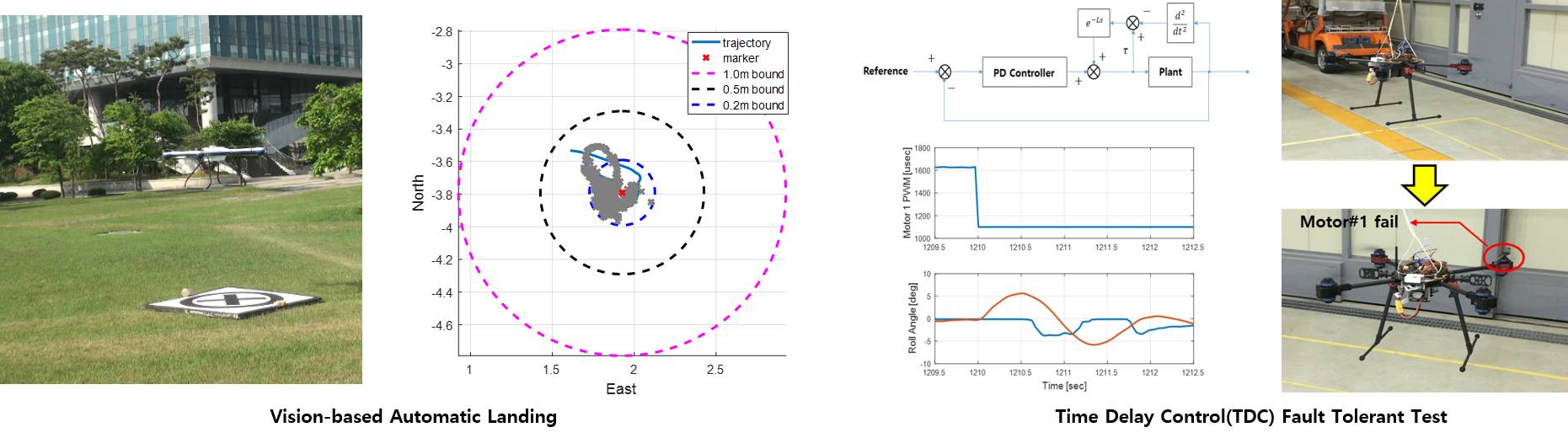
-
Development of the UAS Collision Avoidance System based on the ADS-B
- Vision-based aircraft detection using deep learning
This project aims to develop airborne collision avoidance system and related technology based on the performance of manned aircraft for civil aviation airspace integration operation. In this study, a remote aircraft is detected using an image sensor. Deep learning technology enables detection of flight objects in cluttered backgrounds and has a fast processing speed that can be used in embedded computers.
This research is funded by Uconsystem and the Ministry of Trade, Industry & Energy from 2015.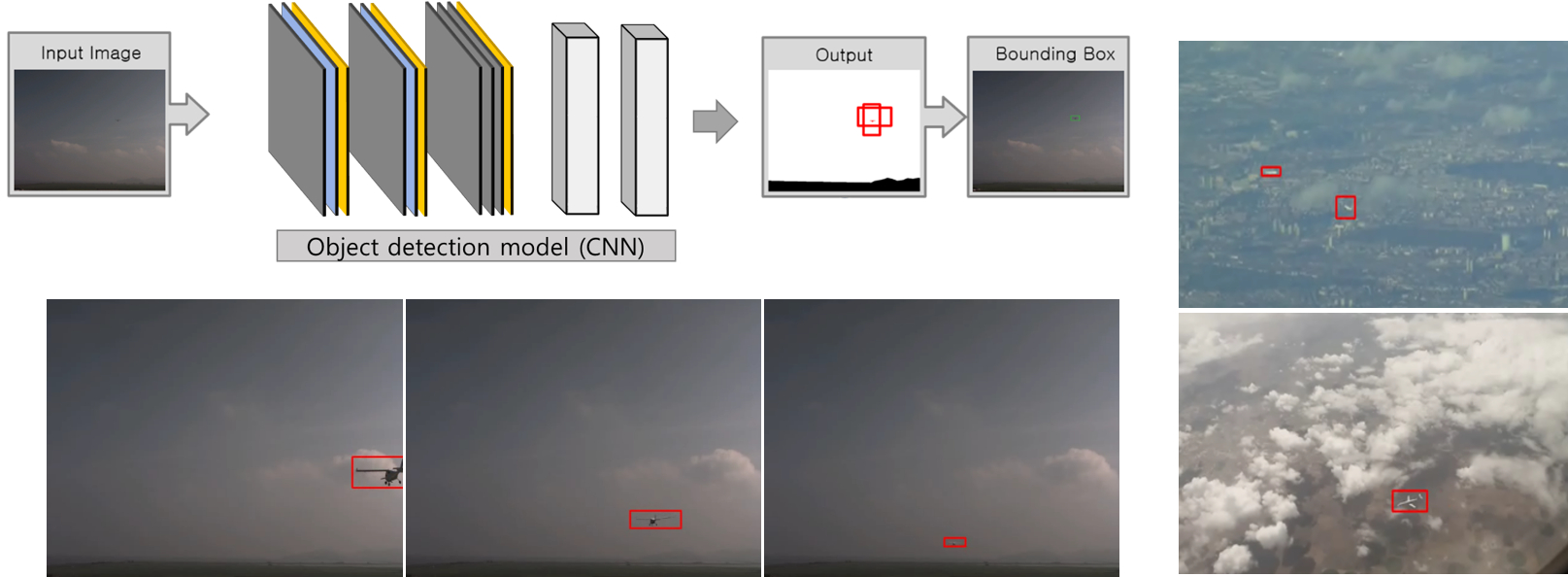
-
Development of deep learning based autonomous open EV platform (2017-20)
Autonomous driving and artificial intelligence technologies are the leading fields of the 4th industrial revolution. In this project, our consortium aims to develop the EV based open autonomous vehicle platform that allows ♂access to the essential technologies for autonomous driving such as perception, planning and control. Among them, our research team is performing autonomous driving control based on End-to-End deep learning ♂which predicts optimal control command from sensing data as one neural network.
This project is funding by Ministry of Trade, Industry and Energy from 2017.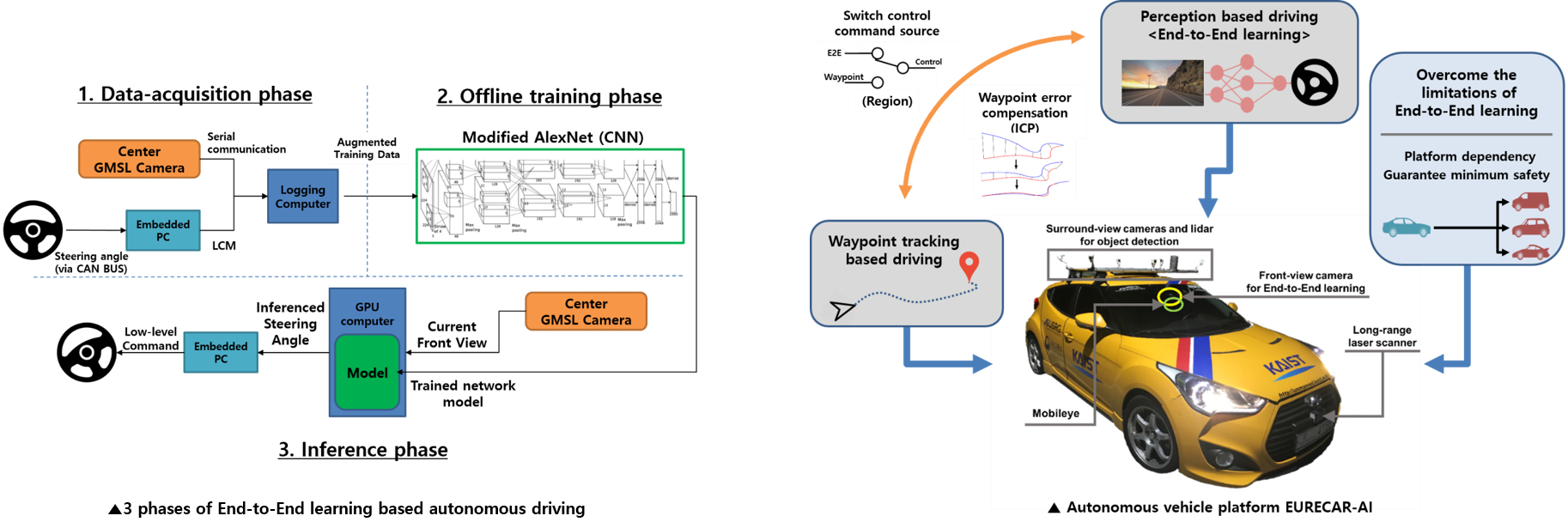
-
The research of vision-based UAV tracking and capturing the target
Recently, drone market increased rapidly according to the growing popularity of drones. However, as the usage of drones increased, the people who take advantage of the drone increased as well, from minor violation like picturing the private life with the camera on it, to a special crime like delivering drugs. This research aims to develop the vision-based UAV to track and capture the target, which is the drone attacking to our camp. To achieve the objective, our research team integrate the autonomous flight system and the on-board image-processing system on the one UAV platform.
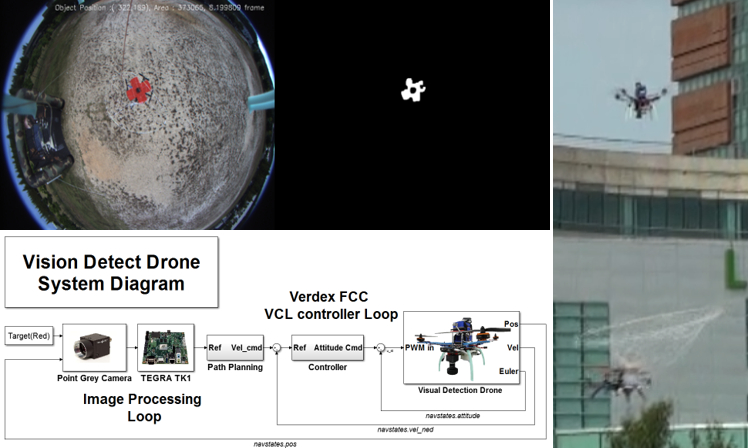
-
Development of human-scale pilot robot - PiBot : Pilot Robot
The purpose of this research is development of a humanoid robot acts as the pilot for converting existing aircraft or car into unmanned aircraft or unmanned car with minimal modifications. In contrast to current trend, such as OPV technology and auto-pilot, this proposed method could give full-authorization to pilot robot and decrease altered parts and the required time. The pilot robot hardware is composed of four 6-DOF manipulators(two for arms and two for legs), two adapters for both hands, body frame, vison sensor. The software architecture is designed to automate flight operation from take-off to landing. The core of software is feedback control of aircraft by manipulating cockpit components based on the flight states received from flight simulator computer and waypoint planning.
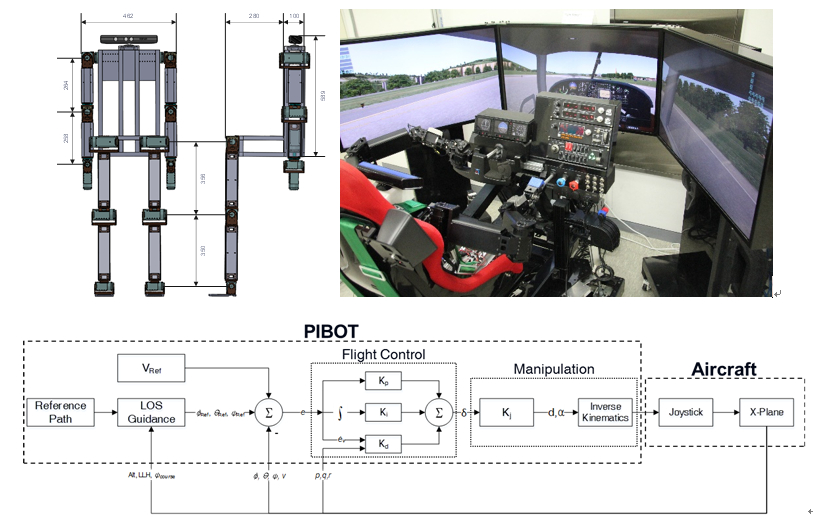
-
Development of the surveilance and reconnaissance UHV (Unmanned Hybrid Vehicle) (2014-17)
The purpose of this research is development of the autonomous robot which mutually supplements both issues of the UGVs and the UAVs by convergence of both systems. Unmanned ground robots have demerits about relatively short mission range and getting over the obstacles, and UAVs have issues of noise problem and lower energy efficiency. The developed robot can achieve various ground/aerial mixed missions which cannot be achieved by existing unmanned robots.
The UHV has ALFUS autonomy level 4, then it decides actions throughout a mission and notices to a user. It will be basically used for the surveillance and reconnaissance, or measurements of the radioactivity, gas, temperature, and humidity with additional sensors. This project demands overall unmanned system techniques such as indoor/outdoor navigation, guidance, obstacle detection and avoidance, environment modeling, path planning, etc.
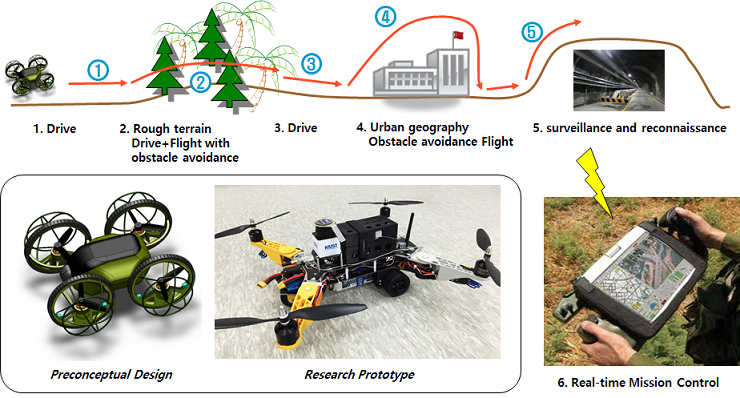
-
EureCar : Self-driving Car
Recently, there have been significant advances in self-driving cars, which will play a key role in future intelligent transportation system. In order for these cars to be successfully deployed in real roads, they must be able to drive by themselves along collision-free paths while obeying various traffic laws. In contrast to many existing approaches that use pre-built environment maps of roads and traffic signals, we propose system using a unified map contains not only the information on real obstacles nearby but also traffic signs and pedestrians as virtual obstacles. Using this map, the path planner can efficiently find paths free from collisions while obeying traffic laws.
EureCar is a Self-driving car that can drives itself along the pre-planned path while avoiding obstacles and obeying various traffic laws. We have been developing 2 Self-driving cars, EureCar and EureCar Turbo. EureCar (our first Self-driving car) has high precision positioning system, 7 laser scanner and 4 camera has been developing for 2 years. EureCar Turbo takes 6 months of development time for the same performance as EureCar with less and low-cost sensors. We could curtail the development period from 2 years to 6 months by using previous software developed for EureCar. Especially, it took only 2 months for developing additional software for EureCar Turbo except the period of hardware implementation and remodeling.

-
Indoor 3D Navigation and Closed-Loop Control using a LiDAR and an IMU - Monte Carlo Localization in an Octree-based Occupancy Grid Map
We are developing a 3D navigation algorithm to provide a MAV with the estimated pose information in real-time. The navigation algorithm is based on Monte Carlo Localization (MCL) using a particle filter. The particle filter calculates likelihood of particles using laser measurements and ray-casted ranges of the particles that uses an octree structure for fast computation. The MCL using a particle filter is implemented to estimate position and attitude of the vehicle.
To validate the proposed indoor navigation algorithm, the experiment is conducted using a quad-rotor platform, a laser scanner, an IMU, a low-level flight controller, and a ground station computer. The onboard flight computer runs a low-level controller for position and attitude control. The attitude and position is controlled by a multi-loop PID controller and the guidance algorithm to follow waypoints or paths is also enabled. In addition, obstacle avoidance is available to deal with sudden interference of human for safety.
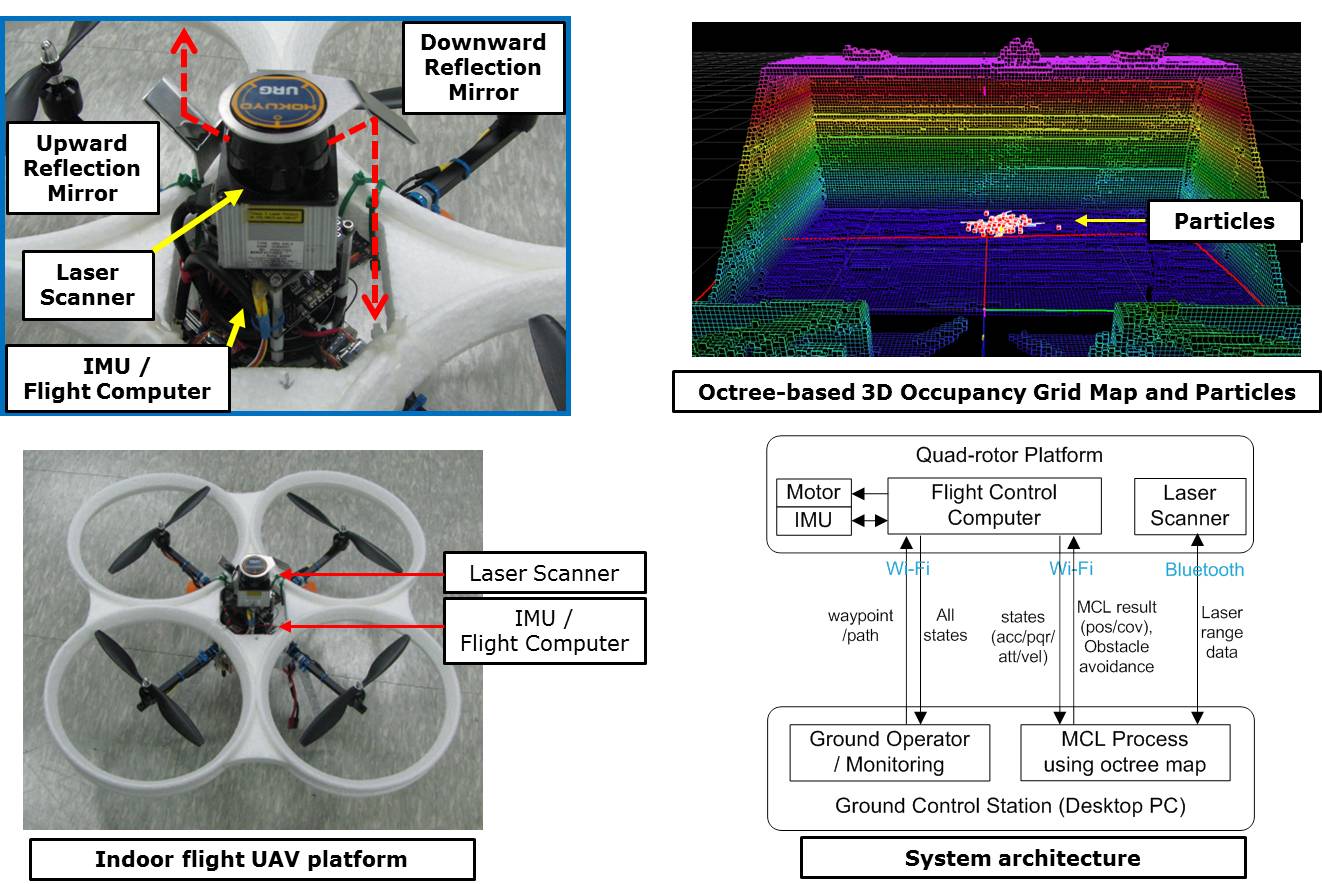

Testbeds
We have a variety of testbeds to perform researches
-

Our proud Indy race platform (yes, we own it!!)
-
- Optionally Piloted Aicraft based on Flight Design's CTLS(left), Koran's first light sports airplane, KLA-100(right)


-
- 전기차 기반 자율주행차량


-
- 자율주행 배달로봇

-
- Nvidia DGX Station, 3D printers including high-quality MarkForged


Teaching
-
spring 2025
- EE478 Introduction to Multi-disciplinary Robotics: Building AI-enabled Drones - 로봇 비전 및 센싱: 지능형 드론 구현
-
fall 2024
- RE540 Robot Vision and Sensing: Building AI-enabled Mobile Robots - 로봇 비전 및 센싱: 자율탐사로버 구현
-
spring 2024
- EE405A Electronics Design Lab: Building AI-empowered Autonomously Exploring Rovers - 전자 디자인 랩: 자율탐사로버 구현
-
fall 2023
- EE405A Electronics Design Lab: Building AI-empowered Autonomous Cars - 전자 디자인 랩: 지능형 자율주행차 구현
-
spring 2023
- EE478 Introduction to Multi-disciplinary Robotics - 융합적 로봇공학 개론 (드론을 중심으로)
-
fall 2022
- EE405A Electronics Design Lab: Building AI-empowered Autonomous Cars - 전자 디자인 랩: 지능형 자율주행차 구현
-
spring 2022
- EE478 Introduction to Multi-disciplinary Robotics - 융합적 로봇공학 개론 (드론을 중심으로)
-
fall 2021
- EE478 Introduction to Multi-disciplinary Robotics - 융합적 로봇공학 개론 (드론을 중심으로)
-
spring 2021
- EE405A Electronics Design Lab: Building AI-empowered Autonomous Cars - 전자 디자인 랩: 지능형 자율주행차 구현
-
fall 2020
- EE807 Special Topics in Electrical Engineering - 전기공학특강<필드로보틱스: 지능형 드론 및 실도로 자율주행차 특론>
-
spring 2020
- EE488 Special Topics in Electrical Engineering - 전기 전자공학특강<융합적 로봇공학>
-
fall 2019
- EE807 Special Topics in Electrical Engineering - 전기공학특강<필드로보틱스 개론>
-
spring 2019
- EE488 Special Topics in Electrical Engineering - 전기 전자공학특강<융합적 로봇공학>
- HSS190 Freshman Seminar 1 - 새내기 세미나 1<전기및전자공학부>
-
Fall 2018
- EE807 Special Topics in Electrical Engineering - 전기공학특강<필드로보틱스 개론>
-
Spring 2018
- AE480 Aerospace Applied Electronics
- AE553 Advanced Linear Stability and Control
-
Fall 2016
- AE450 Flight Dynamics and Control - 비행 동역학 및 제어
-
Spring 2016
- AE480 Aerospace Applied Electronics - 항공우주 응용전자공학
- HSS190 Freshman Semina 1<Div. of Aerospace Engineering> - 새내기 세미나 1<항공우주공학과>
-
Fall 2015
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE406 Aerospace System DesignII - 항공우주시스템설계 ll
-
Spring 2015
- MAE464 Fundamentals of Control Theory and Practice - 기초 제어 이론 및 실습
-
Fall 2014
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
-
Spring 2014
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE309 Aerospace Experiment II (with Prof. D. J. Lee) - 항공 우주 공학 실험 ll
-
Fall 2013
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE309 Aerospace Experiment II (with Prof. D. J. Lee) - 항공 우주 공학 실험 ll
-
Spring 2013
- MAE464 Fundamentals of Control Theory and Practice - 기초 제어 이론 및 실습
- MAE890 Introduction to Field Robotics (항공우주특론: 필드로봇공학개론) with Prof. Jinwhan Kim and Han-lim Choi (special lecture by Jiyun Lee)
-
Fall 2012
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE309 Aerospace Experiment II (with Prof. S. J. Kwon) - 항공 우주 공학 실험 ll
-
Spring 2012
- MAE464 Fundamentals of Control Theory and Practice - 기초 제어 이론 및 실습
-
Fall 2011
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE309 Aerospace Experiment II (with Prof. S. J. Kwon) - 항공 우주 공학 실험 ll
-
Spring 2011
- MAE464 Fundamentals of Control Theory and Practice - 기초 제어 이론 및 실습
-
Fall 2010
- MAE596 Advanced Flight Stability and Control - 비행 동역학 및 제어
- MAE309 Aerospace Engineering Laboratory Ⅱ - 항공 우주 공학 실험 ll
-
Spring 2010
- MAE464 Fundamentals of Control Theory and Practice - 기초 제어 이론 및 실습
- MAE890 Special Topics in Aerospace Engineering - 항공 우주 공학 특강
-
Fall 2009
- MAE465 Flight Dynamics and Control - 기초 제어 이론 및 실습
- MAE309 Aerospace Experiment II (with Prof. S. J. Kwon) - 항공 우주 공학 실험 ll
-
Spring 2009
- MAE464 Linear System Modeling and Control - 선형 시스템 제어 및 모델링
- MAE405 Aerospace Design I (with Prof. J. M. Lee) - 항공 우주 공학 설계 l
-
Fall 2008
- MAE465 Flight Dynamics and Control - 비행 동역학 및 제어
- MAE406 Aerospace System Design II -항공 우주 공학 설계 ll
- MAE309 Aerospace Experiment II (with Prof. D. J Lee) - 항공 우주 공학 실험 ll
-
Spring 2008
- MAE464 Linear System Modeling and Control - 선형 시스템 제어 및 모델링
- Text: Automatic Control Systems by B. Kuo, Prentice-Hall
-
Fall 2007
- MAE250 Dynamics (substituting for Prof. Tahk) - 동역학
- Dynamics by Meriam and Kraige John Wiley and Sons.
- MAE465 Flight Dynamics and Control (substituting for Prof. Tahk)
Text: 비행동역학 및 제어 (Korean Text)
Flight Stability and Automatic Control by R. Nelson, McGraw Hill
In the beginning, the students are introduced to the equations of motion of aircraft. Since these nonlinear equations are not convenient for control design, linearized and decoupled equations are derived. These simplified equations are written in terms of aerodynamic derivatives, which are very important for studying dynamic characteristics of flight vehicles. Longitudinal motion and lateral/directional motion are studied to obtain basic understandings required for control design. Various stability/ control augmentation systems such as pitch attitude control, normal acceleration control, turn coordination, yaw damper are then treated.
-
Spring 2007
- MAE405 Aerospace Design I
- In this class, the students learn and practice the basic rules and guidelines for conceptual design of various aircraft systems, including aircraft configuration, basic weight estimation, planform layout, airfoil selection, propulsion, and more. The class is divided to form subgroups to implement their own designs to create viable aircraft systems meeting intended performance goals. Their designs are put into a series of test flight using radio-controlled scale models.
- To access class webboard: click here (need password)
- Before the main event, we had a preliminary test flight on June 3, 07. We also had a successful main flight event on June 4, 07!! Here, I'd like to commend my students for their hard work!!
- Go to Picture Gallery for preliminary flight event
- Go to Picture Gallery for MAIN flight event
- For video clips, click the team pictures below and also the following links:
- Team Luft: Bumble Bee: Main flight, Encore flight
- Team ParkingSpy: FSK-1: 1st Try, 2nd Try, 3rd Try
- Team AeroSapien: CASPER: Main flight (2nd)
Collaboration
-
on-campus coalition
KAIST insitute for Robotics (KI-R) (~Aug 2022) -
global collaboration
Team CoStar for DARPA Subterranean Challenge We collaborated with Dr. Ali Agar at NASA JPL for DARPA Subterranean Challenge from 2018 to 2021.
Robotics Laboratory, EECS, UC Berkeley led by Professor Shankar Sastry
Past researches
-
한화디펜스 다중센서 융합기반 전천후 환경인식 기술 연구(2019)
3D 거리센서(LiDAR)와 2D 이미자센서(Omni-camera, Ladybug5) 융합 및 인공지능 기법(Semantic segmentation)을 활용한 야지(비정형 지형) 환경 인식 기법 개발
- Sensor fusion을 위한 구조물 설계
- Sensor fusion algorithm 개발 및 적용
- Deep learning 기반의 Semantic segmentation 기법 개발 및 적용
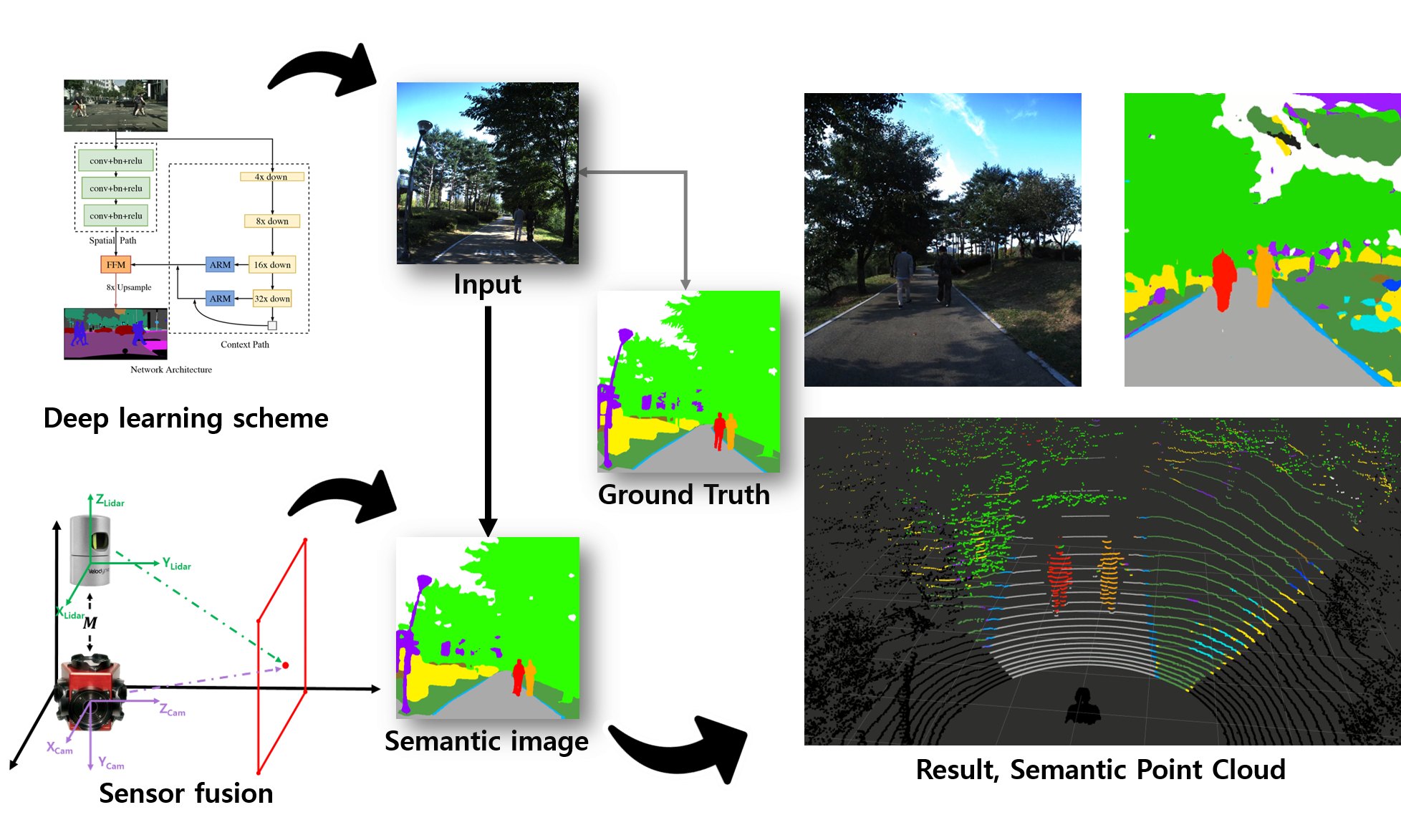
-
고기동성 무인 전투기의 근접 공중전을 위한 유도 제어 기법 연구
Research on Guidance and Control of Highly Maneuverable UCAVs in Dogfight (NRF)In this research, we aim to develop guidance algorithms that enable highly maneuverable unmanned combat aerial vehicles(UCAVs) equipped with thrust vectoring to engage a close-range aerial combat. The proposed three-dimensional guidance algorithm is complemented by a precision trajectory tracking, which is robust to damages or malfunctions of control surfaces or airframes. The proposed guidance and control algorithms will be validated in a series of high-fidelity nonlinear simulation using MATLAB and X-Plane and then real flight experiments with small-size UCAV test platform.
This project is funding by National Research Foundation (NRF) from 2011.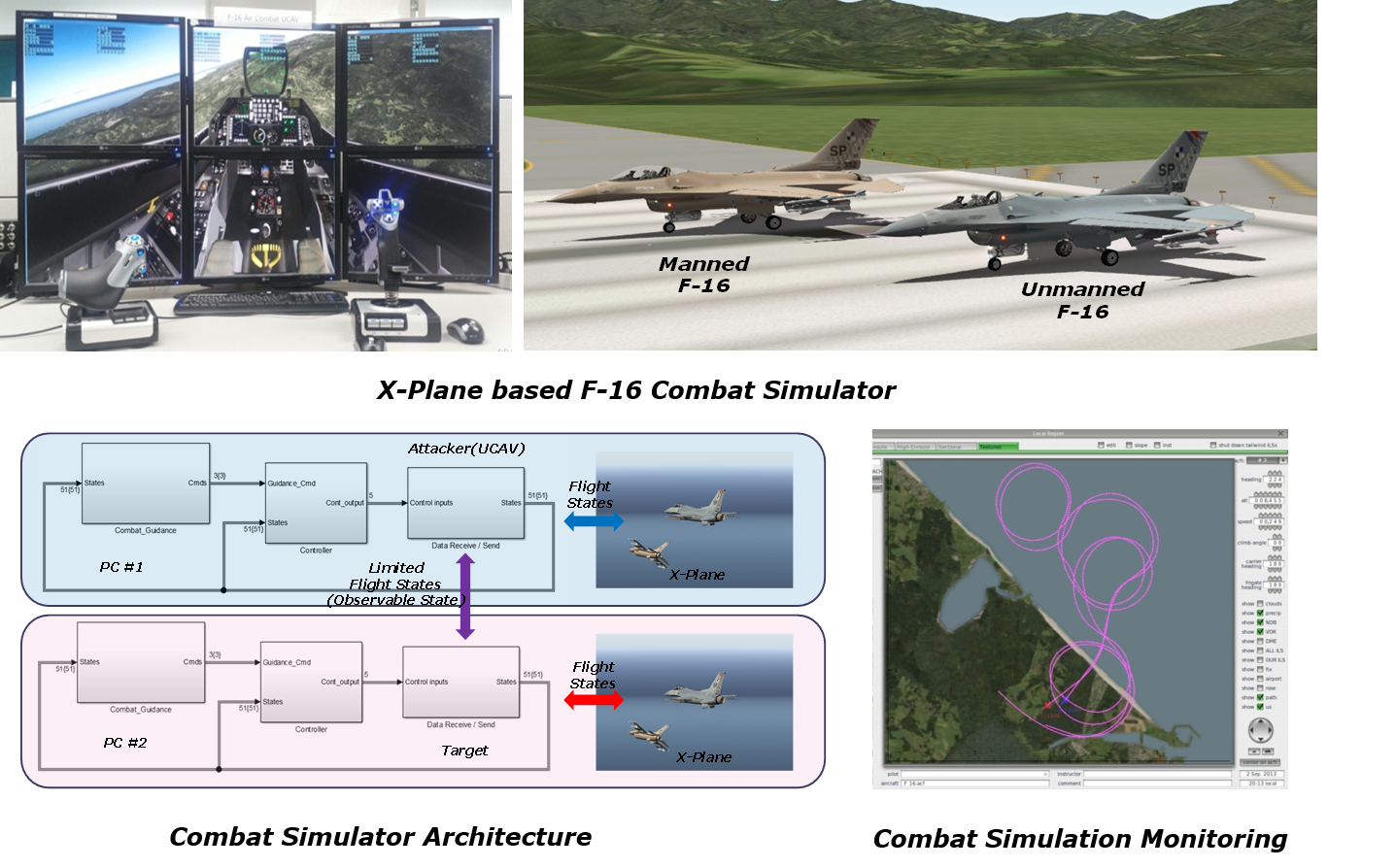
-
소형 무인기를 이용한 제어 알리고즘 검증 비행시험 용역
Flight validation of control law using a small UAV (KARI)In this research, The stability and control augmentation system and longitudinal auto-landing guidance law, using Time Delay Control, is proposed and evaluated through a simulation with model uncertainties and wind disturbances. And the TDC is validated by a series of flight experiments.
This project is funding by Korea Aerospace Research Institute(KARI) from 2010.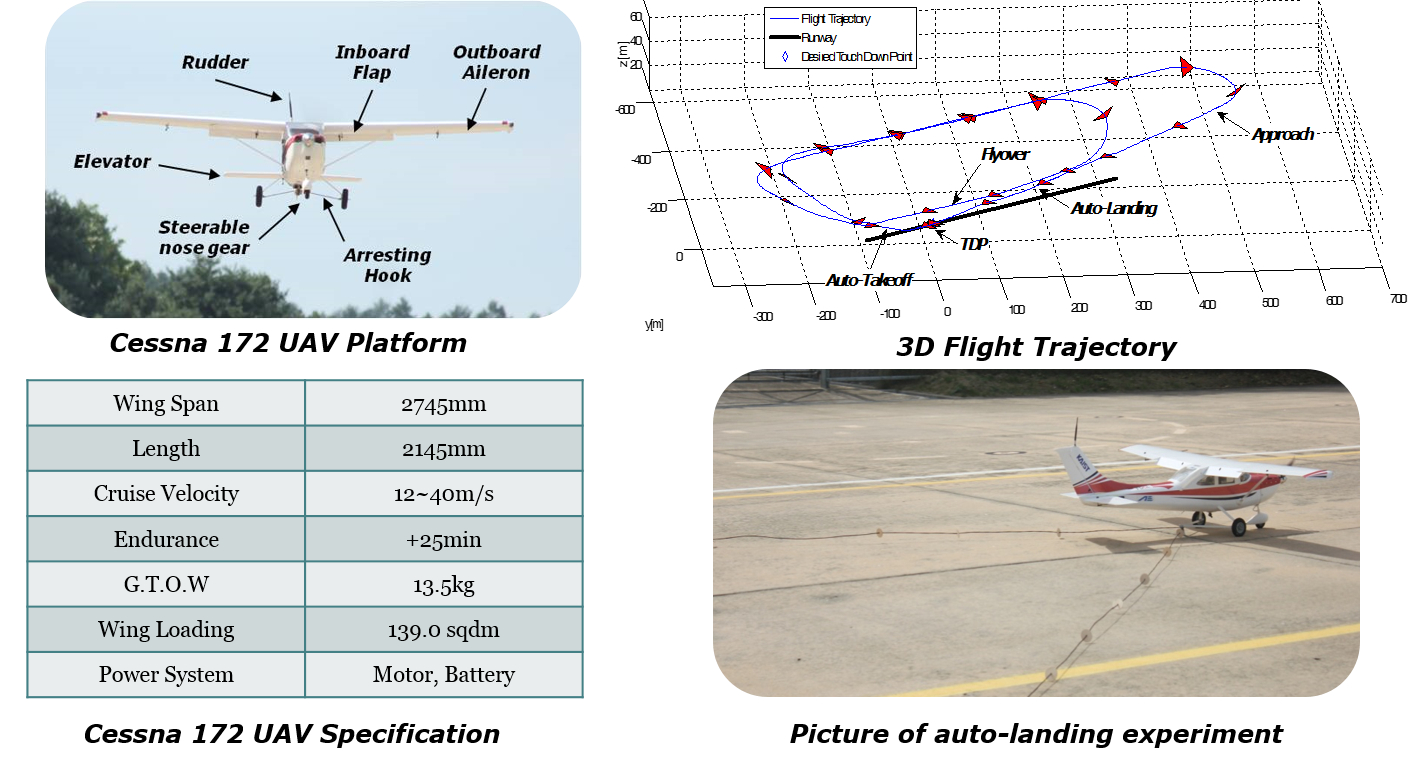
-
Tail-sitter방식 비행체 공력특성 및 제어기법 연구(ADD)
Study on Aerodynamic Characteristics and Control Law for a Tail-sitter (ADD)There have been ongoing interests in a type of aircraft that are capable of vertical take-off/landing (VTOL) for greater operability and high-speed horizontal flight capability for maximal mission range. A possible solution for such application is tail-sitters, which takes off vertically and transitions into a horizontal flight. During the entire mission of a tail-sitter from take-off to landing, it goes through largely varying dynamic characteristics. In this project, we propose a set of controllers for horizontal, vertical, and transition flight regimes. Especially, for transition, in conjunction with conventional multi-loop feedback, we use L1 adaptive control to supplement the linear controllers. The proposed controller were first validated with simulation models and then validated in actual flight tests to successfully demonstrate its capability to control the vehicle over the entire operating range.
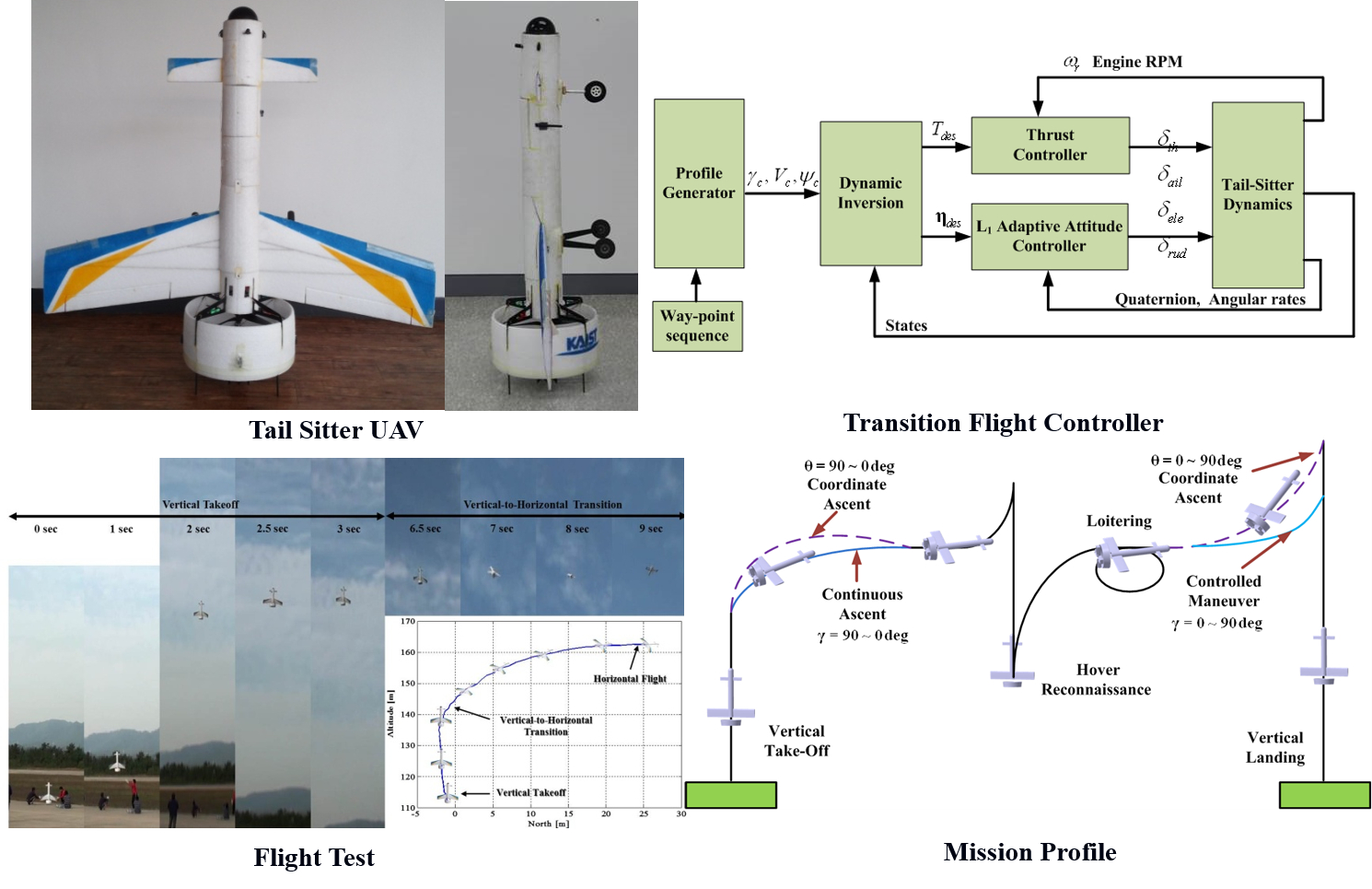
-
이종 자율 무인기 협업 체계 선행연구 , ADD
Cooperative System for Heterogeneous UAVs (ADD)Unmanned Aerial Vehicles(UAVs) have been performed important role in modern wars. Several countries including United States are accelerating developments on the unmanned aircraft systems while revealing their experimental works on the unmanned systems. Unmanned agents have been applied in many warfare situations such as reconnaissance, surveillance or retrieving land mines. In the future, however, multi and heterogeneous unmanned platforms will perform various cooperative tasks such as assault missions, which are managed by high-level commands from a commander. We are therefore doing a research on developing such a cooperative system for heterogeneous UAVs. We are focusing on designing a system to manipulate several fixed and rotary wing UAVs simultaneously in order to provide availability of cooperative missions.
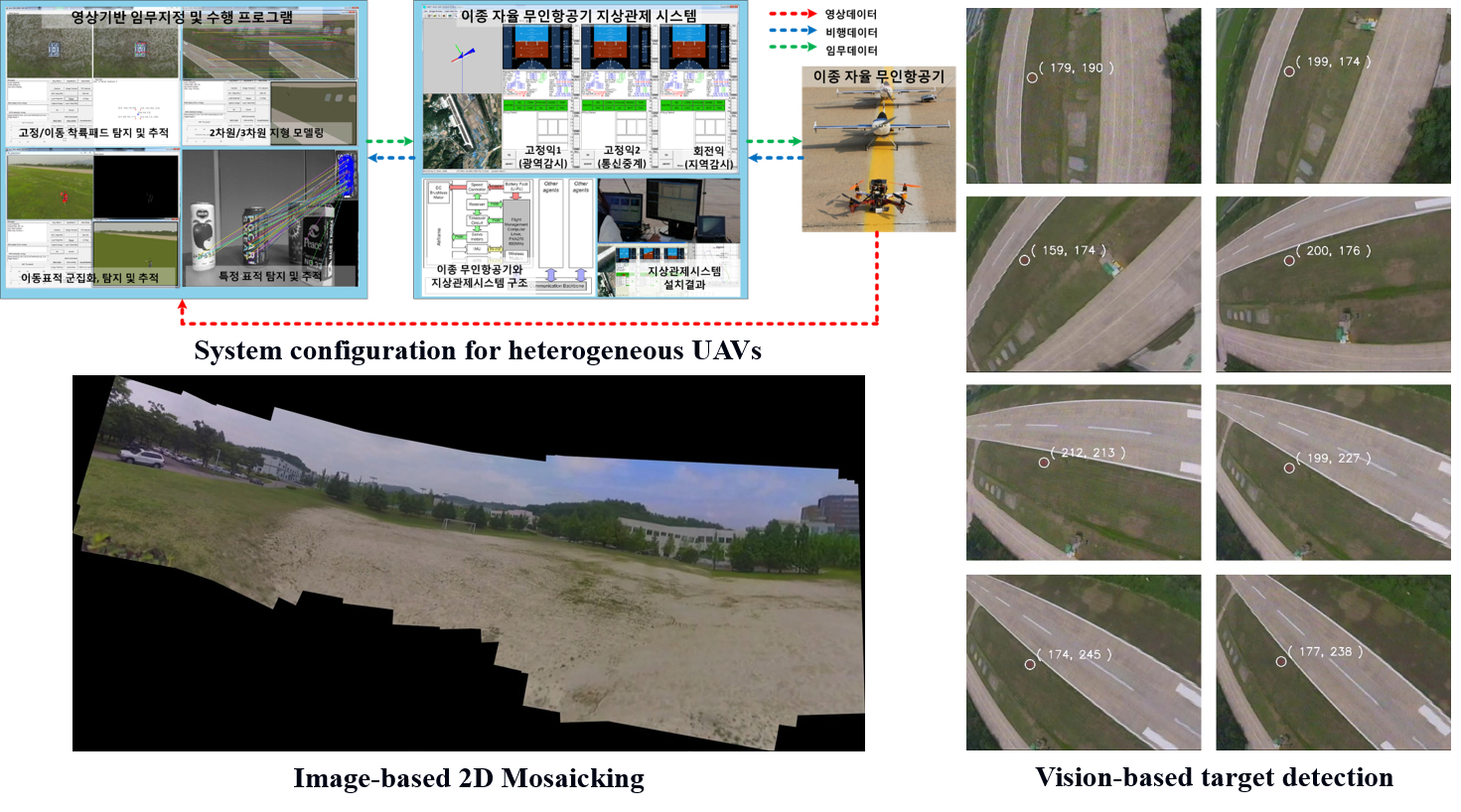
-
Intelligence-based Unmanned Aerial Vehicle Control Specified Research Center
The aim of Intelligence-based Unmanned Aerial Vehicle Control Specified Research Center is developing the original technology of UCAV(Unmanned Aerial Combat Vehicle). Specified research center뭩 research objective is establishing the theoretical structures and related technology bases for single/multi UAV뭩 effective fulfillment of surveillance/reconnaissance/information gathering/ attack in future warfare. UAV used for reconnaissance and transportation conducts a key role in current warfare. In the near future, UAV is expected to play a key role in warfare by conducting missions such as destroying enemy뭩 air defense network, winning the air and other important tasks with sufficient maneuverability and attack ability. To reduce RCS(Radar Cross Section), UCAV requires specialized wing and body shape which causes instability of aircraft. Also, aerodynamic analysis of specialized wing and body is difficult. Thus, development of new smart flight control device, task design, decision making and effective ground system must be preceded for UCAV to be controlled stably and to perform attack missions which can be very complicating.

The specified research center뭩 key subjects of research are shape design of UCAV which has minimum RCS and to secure the original technology for smart guide control and decision making algorithm for improvement of performance ability. It is required to research the smart decision making algorithm, shape of UCAV for LPI(Low Probability of Intercept)/high agile maneuver, smart control system based on piloted handling and ground system for management of multiple UAV(Unmanned aerial vehicle).
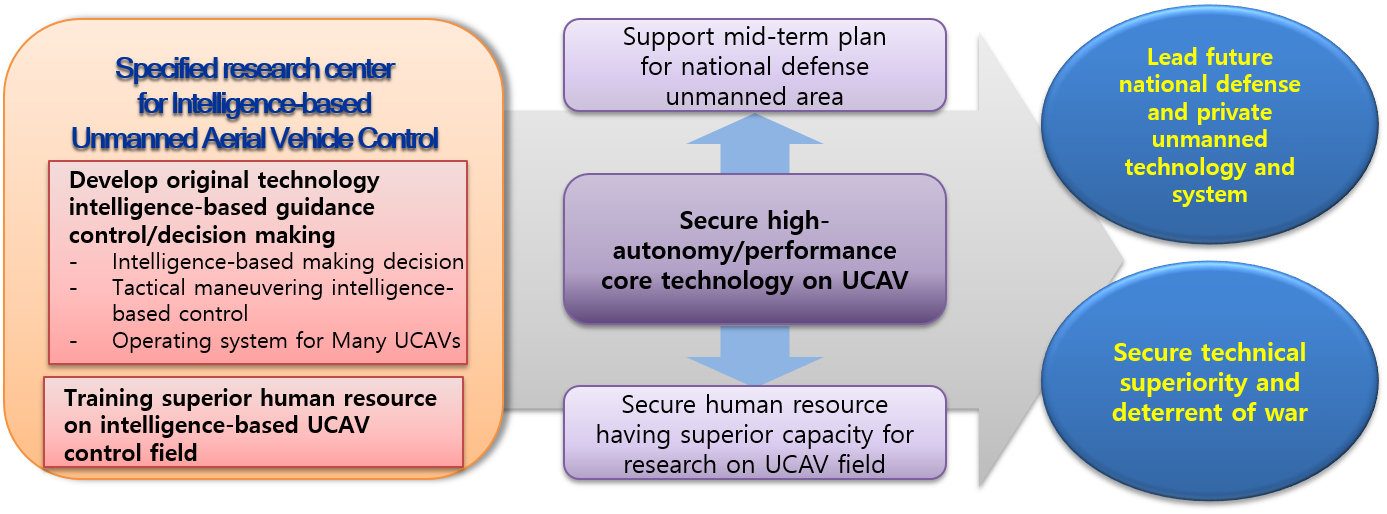
The researches for UCAV have been conducted narrowly in South Korea. Thus, to secure technologies of related areas, establishment of specified research center for the development of UCAV technology and training of professional manpower was required. To meet these requirements, this specified research center conducts research on 3 detailed assignments. 3 detailed assignments are as follows;
SU-1 : A Study on Smart Decision Making Algorithm for Unmanned Air Vehicle
SU-2 : A Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle
SU-3 : A study on the technology of Human-Machine Interaction to reduce load of multiple UAV operator
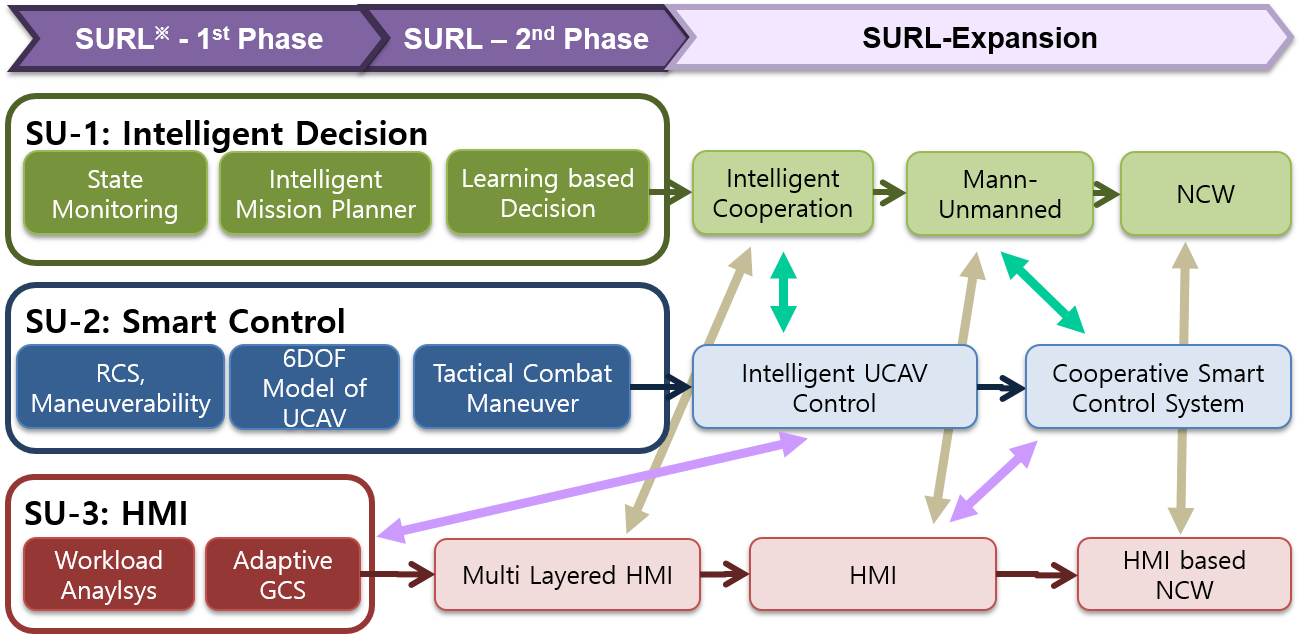
SU-1 : A Study on Smart Decision Making Algorithm for Unmanned Air Vehicle
The purpose of a Study on Smart Decision Making Algorithm for Unmanned Aerial Vehicle is to develop smart decision making algorithm to improve the mission success rate in response to uncertain and dynamic using environment, risk elements and changing of aircraft뭩 condition. To achieve this purpose, study on study items, as follows, will be conducted.
> Study on decision making algorithm architecture of intelligent-UCAV
> Study on system monitoring algorithm of intelligent-UCAV
> Study on profile scheduling and task scheduling/re-scheduling algorithm
> Study on intelligent learning algorithm
SU-2 : A Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle
The purpose of a Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle is designing UCAV뭩 shape satisfying LPI/High mobility and evaluating this design and then, using specified configuration, suggesting 6DOF(Degree Of Freedom) guidance model and designing intelligent control system based on piloted handling. To achieve this purpose, study on study items, as follows, will be conducted.
> Aerodynamic analysis for aircraft뭩 controllability and configuration design based on analysis of low RCS.
> Designing aerodynamic database about LPI configuration and constructing 6 DOF model for aerodynamic analysis and handling performance.
-
무인자율주행자동차의 개발
Unmanned Ground Vehicle / Autonomous CarWith Grand Challenge and Urban Challenge held by DARPA in 2004,2005,and 2007 and new car techonologies being introduced that provide drivers with safe and conveinent driving such as parking assistance, cruise control and lane keeping system, Autonomous Car became one of the most popular research area recently.
EURECAR, based on SOUL from Hyundai & KIA Motor Company, is our first autonomous vehicle developed. It can travel without any human control using GPSs and an INS for localization, vision sensors including cameras and laser scanners for local localization and obstacle detection, path-planning algorithms to generate a path that should be tracked, and actuators and their controllers to track the path with good performance. A new version of EURECAR (isn't named yet) with better performance is being developed based on Veloster Turbo also from Hyundai & KIA.
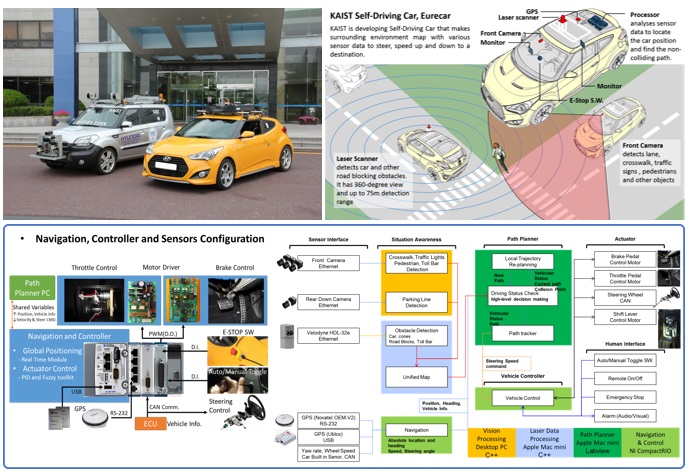
-
복수무인기의 분산시스템 연구 , ADD, 2009 ~ 2011
A Study on a Swarm of Distributed Unmanned Aerial Vehicles (ADD)Future combat system will be carried out by a large number of heterogeneous groups of both manned and unmanned sub-systems, which interact one another in systematic, hierarchical, and highly organic manners, so that a mission can be carried out with minimal collateral damage while maximizing the outcome. Therefore, future warfare will be carried out by groups of hierarchical and organically integrated manned and unmanned groups and therefore research on the integration and operation of heterogeneous multi-agent system must be preceded. Multi-agent scenarios require more sophisticated and flexible operation techniques to adapt to complex and less-predictable situations than conventional single-agent-based approaches. Before each mission, the given mission is analyzed, planned, allocated to the participating agents and then individual path for each agent is planned to the best knowledge available. During the mission, each UAV avoids collision with other agents and other obstacles by dynamically replanning their paths using the map augmented using the sensor measurement. Participating UAVs need to cooperate and synchronize their actions based on the information collected, processed, inferred, and shared. Their missions are then replanned and reassigned in order to adapt to the changes of the surroundings and thus maximize the mission effectiveness.
In this research, we aim to deliver a set of field-deployable research outcomes for the development of distributed multi-UAV system, which is an indispensible component of future network-centric warfare system. We pursue such a goal by researching on the component technologies for efficient operation of multiple UAVs, namely mission planning/assignment, information fusion and inference, dynamic mission allocation, and path planning. The research outcomes on these component technologies will be then integrated, implemented, and validated in a series of simulations and experiments.

-
Micro Flap를 이용한 조종성증대 및 Micro Fin을 이용한 유동제어(아음속) 항력감소 연구,
한화구미사업장 ,2010~2013
A Study on Controllability augmentation with Micro Flap & Drag Attenuation by flow control with Micro Fin (한화)- Micro Fin System
Flow on the airfoil section in a wing is separated earlier as the angle of attack is increased. And the wake after separation makes the drag force bigger so that the more energy is needed to be used for the flight at high angle of attack. This project researches on the reduction of the drag force using vortex generator like Micro Fin to delay the separation even at high angle of attack.- Micro Flap System
A Blended Wing Body(so called, BWB, Flying Wing or Zagi) aircraft doesn’t have any lateral directional control surfaces like vertical fin, and can’t assure that directional stability so that has adverse yaw and large dutch roll dynamic characteristics. This point makes the aircraft have little controllability in that direction. This low stability & controllability in the direction is critical to UCAV(Unmanned Combat Aerial Vehicle) of that type and of course, should be ensured. This project studies on the augmentation of controllability of UCAV(or normal UAV) of that type using the Micro Flap which is a control surface for the yaw direction.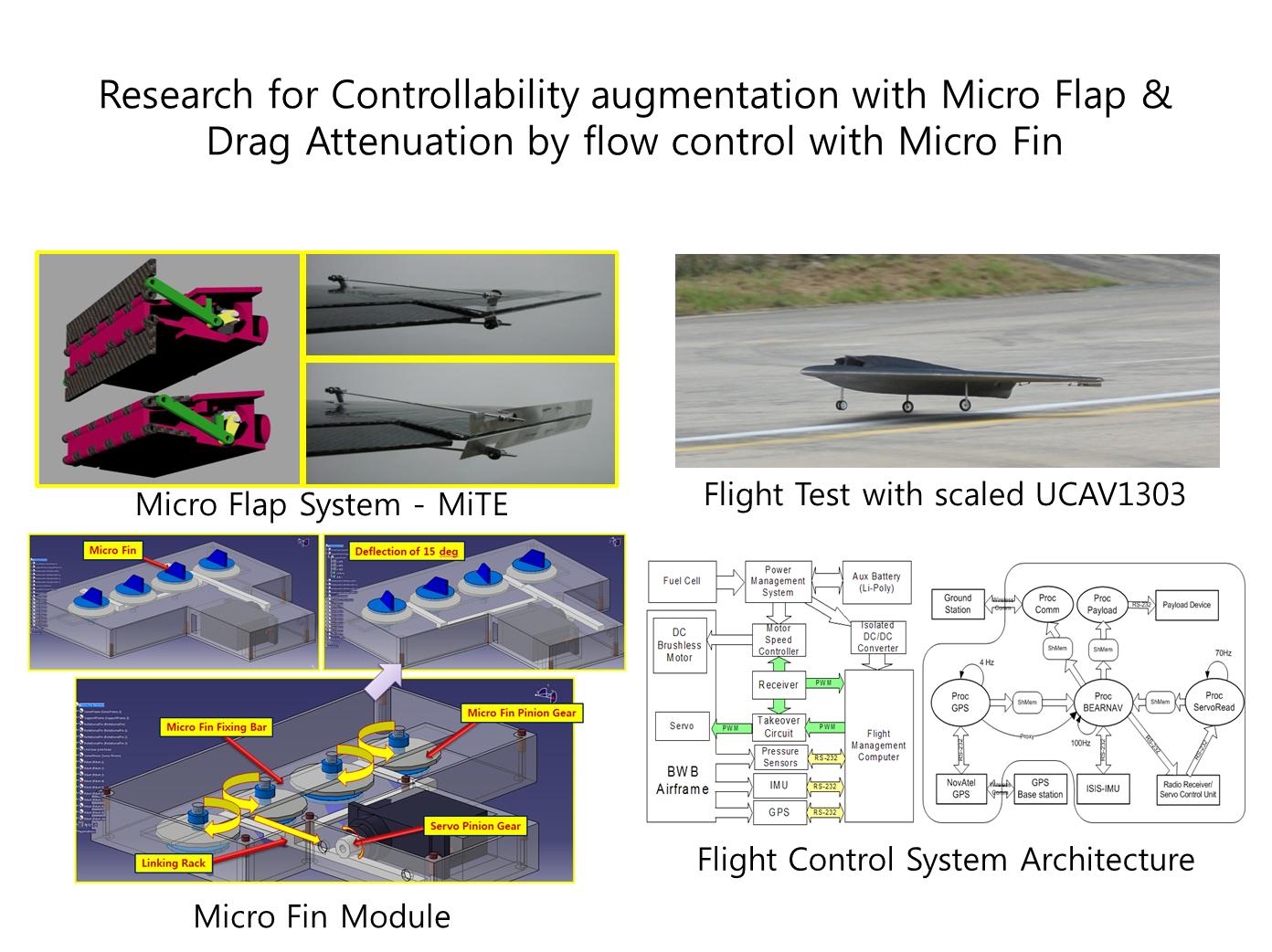
-
산업용 필드로봇 개발 : 채굴용 자동 소형 채탄기 개발 , 중소기업청 , 2009~2010
Development of a field robot : Autonomous explorating and mining robot in extremely harsh environment (중소기업청)We are developing a mining robot works in underground coal mine has extremely harsh environment to human workers. The robot has to maintain its mechanical reliability under high temperature, high humidity, and lots of dust in the air. Also, the robot can measure the environment map and localize itself by fusing heterogeneous sensors such as stereo camera, laser scanner, and inertial measurement unit. Measured data analyzed intellectually is transmitted to human in the remote control room, so that the human worker could control the robot easily using virtual reality technology and force feedback joysticks. Therefore, development of this mining robot will surely contribute to make a safe workspace for human and to decrease the ratio of industrial accident. In addition, it can increase the productivity of underground resources and resolve the suffering from shortage of labor caused by avoiding 3D works.

Photo of mine exploring robot 


PExperiment : Monte Carlo Localization using Particle Filter 

Obstacle avoiding performance, iPhone controller -
극한환경 인식을 위한 Sensor Fusion 및 Localization 기술과 개발 시제품의 내환경성 및 신뢰성 평가기술 개발 , 지식경제부 , 2009~2011
Future combat system will be carried out by a large number of heterogeneous groups of both manned and unmanned sub-systems, which interact one another in systematic, hierarchical, and highly organic manners, so that a mission can be carried out with minimal collateral damage while maximizing the outcome. Therefore, future warfare will be carried out by groups of hierarchical and organically integrated manned and unmanned groups and therefore research on the integration and operation of heterogeneous multi-agent system must be preceded. Multi-agent scenarios require more sophisticated and flexible operation techniques to adapt to complex and less-predictable situations than conventional single-agent-based approaches. Before each mission, the given mission is analyzed, planned, allocated to the participating agents and then individual path for each agent is planned to the best knowledge available. During the mission, each UAV avoids collision with other agents and other obstacles by dynamically replanning their paths using the map augmented using the sensor measurement. Participating UAVs need to cooperate and synchronize their actions based on the information collected, processed, inferred, and shared. Their missions are then replanned and reassigned in order to adapt to the changes of the surroundings and thus maximize the mission effectiveness.
In this research, we aim to deliver a set of field-deployable research outcomes for the development of distributed multi-UAV system, which is an indispensible component of future network-centric warfare system. We pursue such a goal by researching on the component technologies for efficient operation of multiple UAVs, namely mission planning/assignment, information fusion and inference, dynamic mission allocation, and path planning. The research outcomes on these component technologies will be then integrated, implemented, and validated in a series of simulations and experiments.
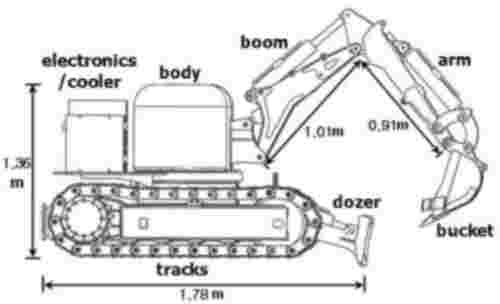

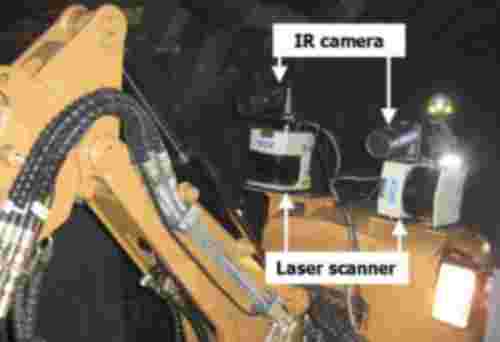
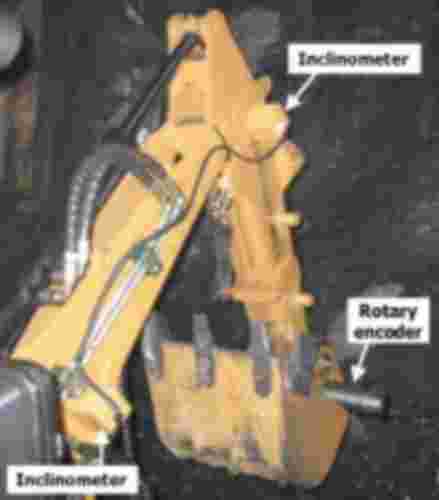
Coal Mining Robot Design and Photos 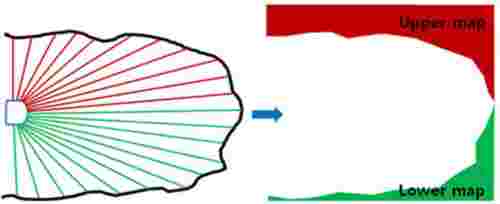

Real-time Duplex Elevation Mapping 
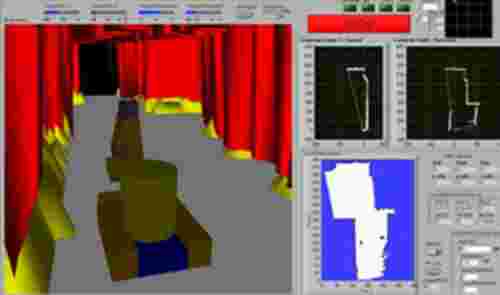
Remote Control System 

Field Test -
고세장비 유연날개 비행체 공탄성 해석기법 연구 , ADD, 2009~2011
A Study on Aeroelastic Analysis Technique for Aircraft with High Aspect Ratio Flexible Wing (ADD)Aircraft are inherently flexible and flexibility can be used to advantage as a design feature for improved performance. Flexible aircraft are subject to interaction between flight mechanics, structural dynamics, and flight control system dynamics. Aeroservoelastic instability can lead to disastrous failures in aircraft as was recently the case for several aircraft. These problems are very similar to flutter accidents which occurred two decades age.
Aeroservoelasticity(ASE) is a multidisciplinary technology dealing with the interaction of the aircraft’s flexile structure, the steady and unsteady aerodynamic forces resulting from the aircraft motion, and the flight control systems. Detailed and quite complex mathematical models are required to accurately predict" ASE interactions" and to design active control systems for flexible vehicle applications.
A compatible mathematical model of the coupled dynamics of flight mechanics, flight control, and structural dynamics must be established. Such models(using the time and frequency domain descriptions) are available in the aeroelastic analysis for aircraft with high aspect ratio flexible wing to assist in the design and clearance of flight control systems. Therefore, the aeroelastic analysis technique for aircraft with high aspect ratio flexible wing, and its use in aircraft design applications are studying.


Examples of High aspect ratio flexible wing (Accident scene of Helios & Global Hawk -
영상기반 충돌회피 기술연구, 한국항공우주연구원, 2010 ~ 2012 Tail-sitter의 자동 비행 연구 및 개발 , ADD
A study on vision sensor based collision avoidance, KARI, 2010 ~ 2012S (한국항공우주연구원)To employ unmanned aerial vehicles into same airspace with manned aircraft in near future, collision avoidance algorithm for UAV with safety certification will be needed. When other cooperative avoidance systems fail or are not supported, non-cooperative avoidance systems, called sense-and-avoid algorithm such as using radar and camera should be used for detecting and tracking opponent aircraft approaching into UAV's protected volume.
In this research, we develop algorithms and system for collision avoidance of aircraft via vision sensor technology. Various image processing methods and Support Vector Machine (SVM), Kalman filter are used for target detecting and tracking. This Information of target is used for collision avoidance algorithm such as Model Predictive Control (MPC) or potential function approach. Finally, the validation experiments of algorithm for UAV system will be conducted.
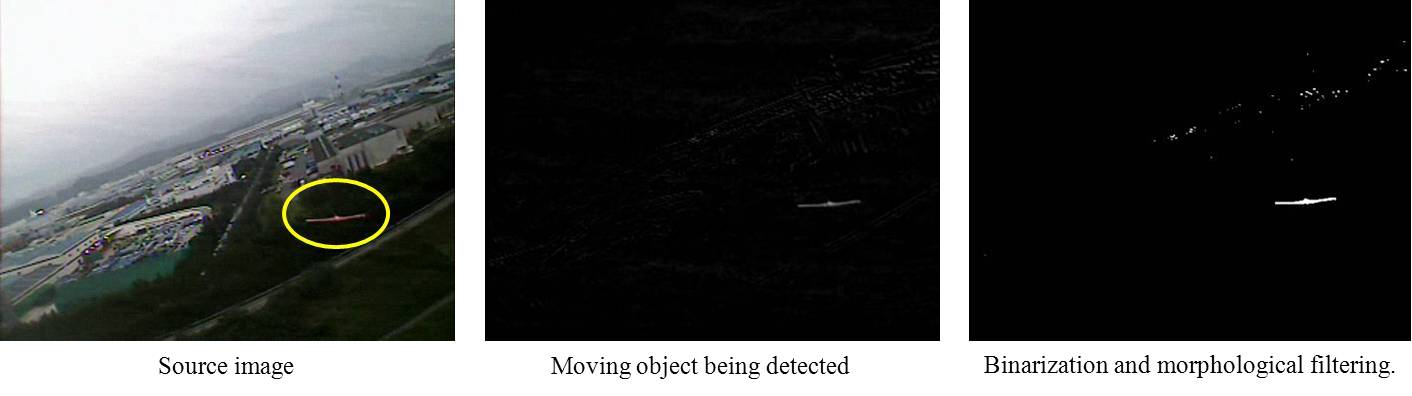
-
Tail-sitter의 자동 비행 연구 및 개발 , ADD
Study on Aerodynamic Characteristics and Control law for a Tail Sitter (ADD)The objective of this project is to develop tail-sitter UAV which is complement defects of the existing reconnaissance UAV. The fixed-wing UAV can’t acquire clear imagery intelligence and the rotorcraft can’t approach operation area quickly due to slow cruise speed. Tail-sitter UAVs have vertical capability of a helicopter and the speed comparable to a fixed-wing airplane.
During the take-off phase, the aircraft climb up to adequate altitude vertically. Then, it goes from vertical to horizontal flight. This process is called the transition flight. After transition, the aircraft flies horizontally just like a fixed wing airplane. T he vehicle regains a vertical attitude via the transition flight and then descends slowly to land. Therefore, we research configuration design and multi-mode controller which consist of hover, transition, and cruise to develop tail-sitter UAV.
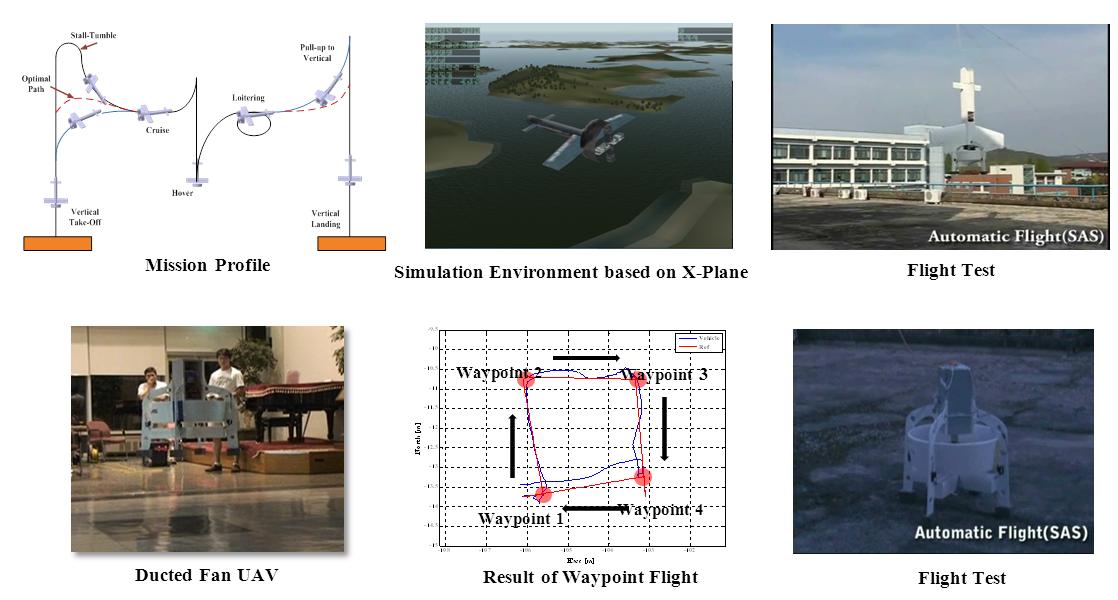
-
고기동성 무인 전투기의 근접 공중전을 위한 유도 제어 기법 연구
Research on Guidance and Control of Highly Maneuverable UCAVs in Dogfight (NRF)In this research, we aim to develop guidance algorithms that enable highly maneuverable unmanned combat aerial vehicles(UCAVs) equipped with thrust vectoring to engage a close-range aerial combat. The proposed three-dimensional guidance algorithm is complemented by a precision trajectory tracking, which is robust to damages or malfunctions of control surfaces or airframes. The proposed guidance and control algorithms will be validated in a series of high-fidelity nonlinear simulation using MATLAB and X-Plane and then real flight experiments with small-size UCAV test platform.
This project is funding by National Research Foundation (NRF) from 2011. -
소형 무인기를 이용한 제어 알리고즘 검증 비행시험 용역
Flight validation of control law using a small UAV (KARI)In this research, The stability and control augmentation system and longitudinal auto-landing guidance law, using Time Delay Control, is proposed and evaluated through a simulation with model uncertainties and wind disturbances. And the TDC is validated by a series of flight experiments.
This project is funding by Korea Aerospace Research Institute(KARI) from 2010. -
MUAV 자동이착륙 설계기법 연구 , ADD, 2009~2010
A Study on Automatic Landing and Take-off Control Law Design (ADD, 2009~2010)The objective of this project which is funded by ADD (Agency for Defense Development) is to design and develop robust and precision guidance and control law for ATOL (Automatic Take-Off and Landing) of MUAV(Medium-altitude long endurance Unmanned Aerial Vehicle) against external disturbances such as wind shear, turbulence and gust. Due to its high aspect-ratio and long wing span, the ATOL system has to consider its aerodynamic and structural characteristics such as Aeroservoelasticity (ASE) and limits of maneuverability in roll during the landing and take-off.

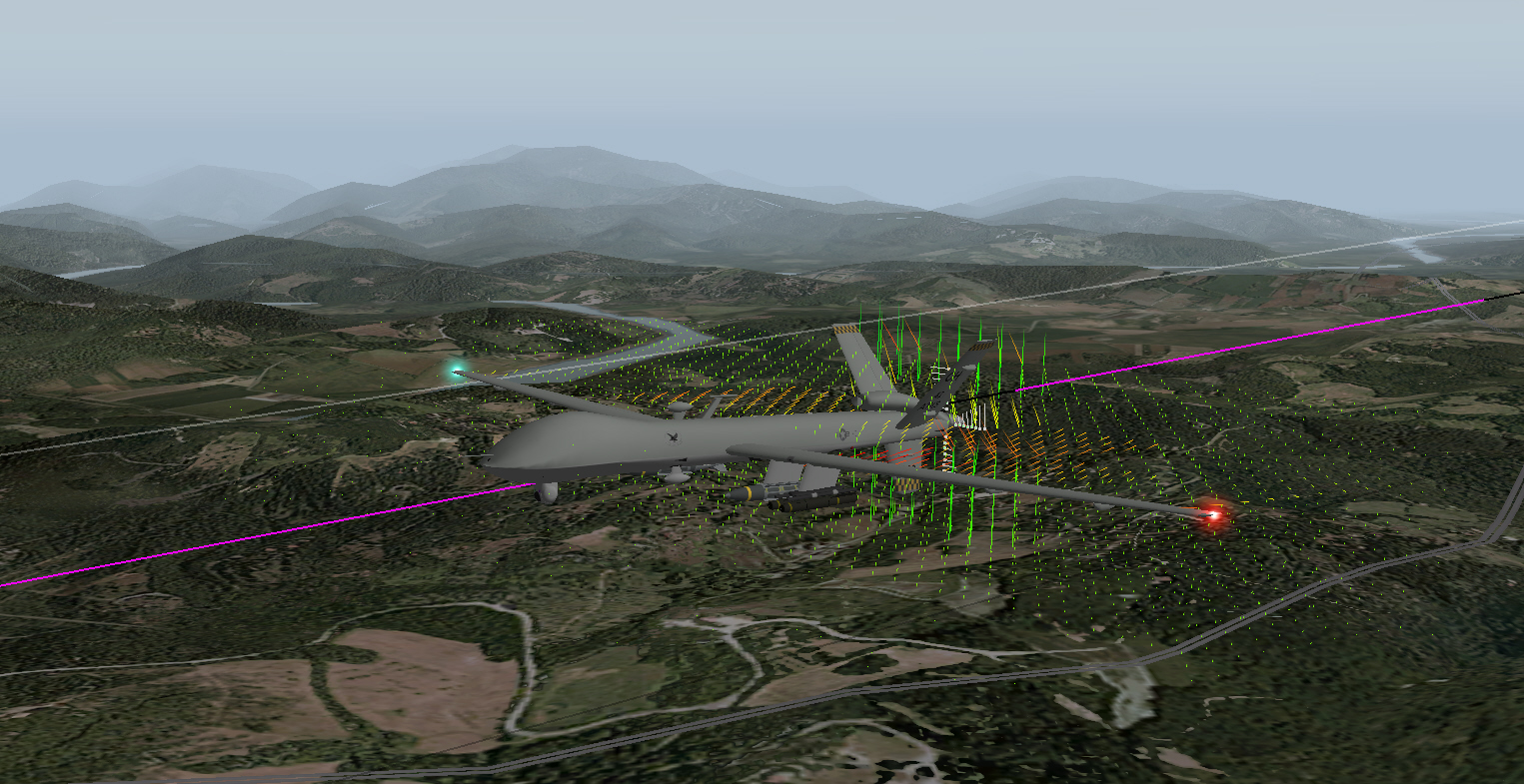
-
현대자동차 무인차량 대회 : 무인차량의 자동주행 연구 , 현대 .기아 자동차 , 2009~2010
A study on Autonomous Drive for Unmanned Ground Vehicle. (현대 .기아 자동차 , 2009~2010)Unmanned technology for almost all forms of transportation (vehicle) such as aerial, ground, and under water vehicles was applied and used for a variety of missions. In the near future, the intelligent unmanned technology is expected to be developed for the unique mission to perform alone, or coordination with the other systems.
Unmanned autonomous ground vehicles create and follow the path for the given waypoints to reach the target area by considering unpredictable internal and external problems. It’s difficult to predict Kinematic / Dynamic constraints unless the vehicle drives mileage and a spacious flat with no obstacles. Therefore, the autonomous systems are required collect information through a number and various kinds of sensors (sensor fusion), reconstruct the environment, generate the safe path and track the path in a predictable time. Especially high-level reasoning skills are required that consider uncertainties and obey traffic laws while driving in the real world.
1st unmanned self-driving vehicle competition will be held under the auspices of the HYUNDAI mobile. The goal is to develop the self-driving car (figure) obeys fair rules and regulations as well as avoid different variety of the obstacles in the road.

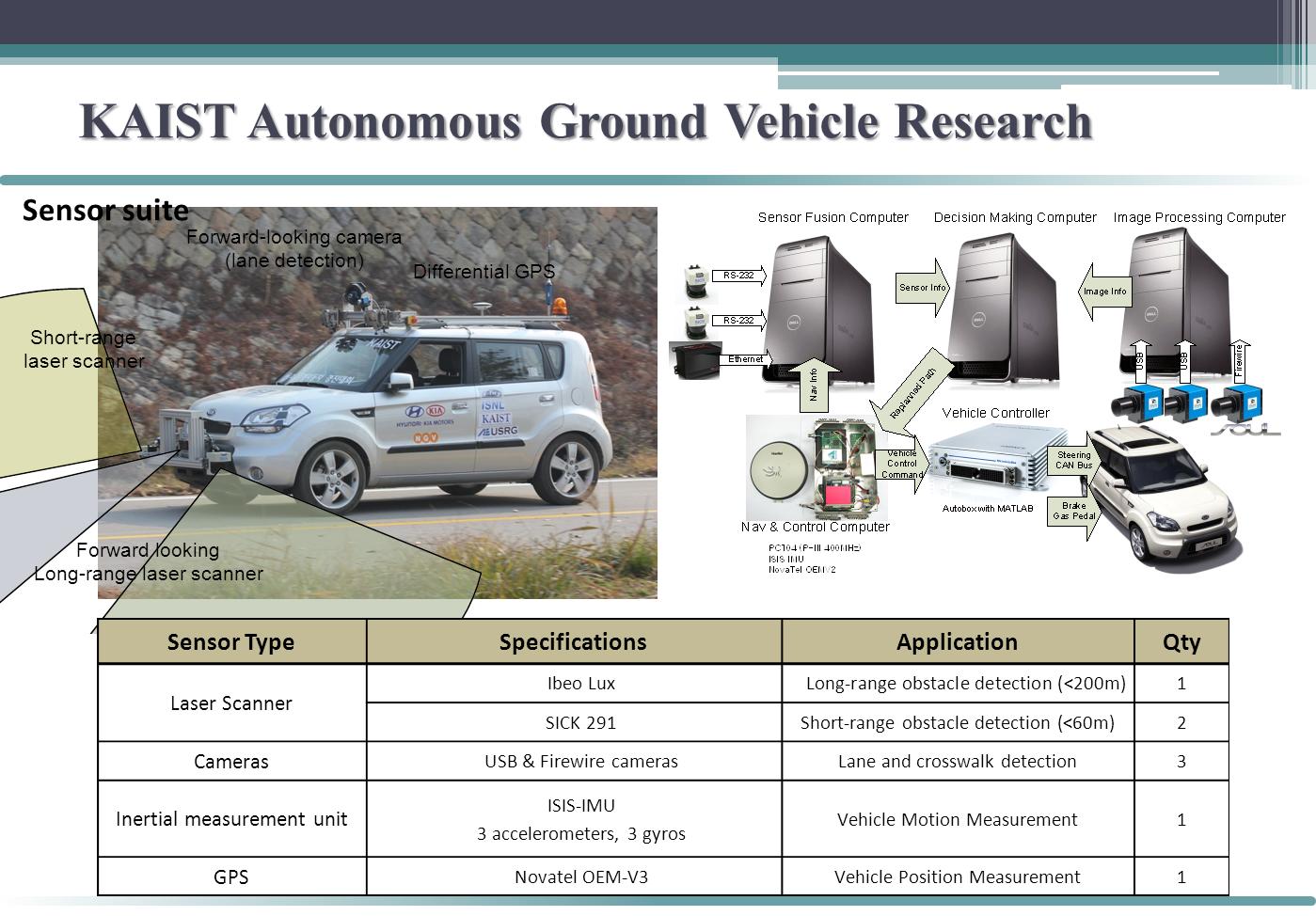
-
한국형 무인전투기 개념연구 및 시범기 개발을 위한 2차년도 개발 용역 (KAI, 2008~2009)
This project is a subscale aircraft, K-UCAV which was funded by Korea Aerospae Indeustries(KAI) to conduct air-to-air and air-to-ground missions, including suppression of enemy air defenses. The plane is 20% scale-down model of the K-UCAV that it has built to validate the aerodynamic aspects of its design.The main wing is the type of low-wing with sweepback angle and taper and tail wing is the V-tail type.

UCAV Front View 
UCAV Flight Test
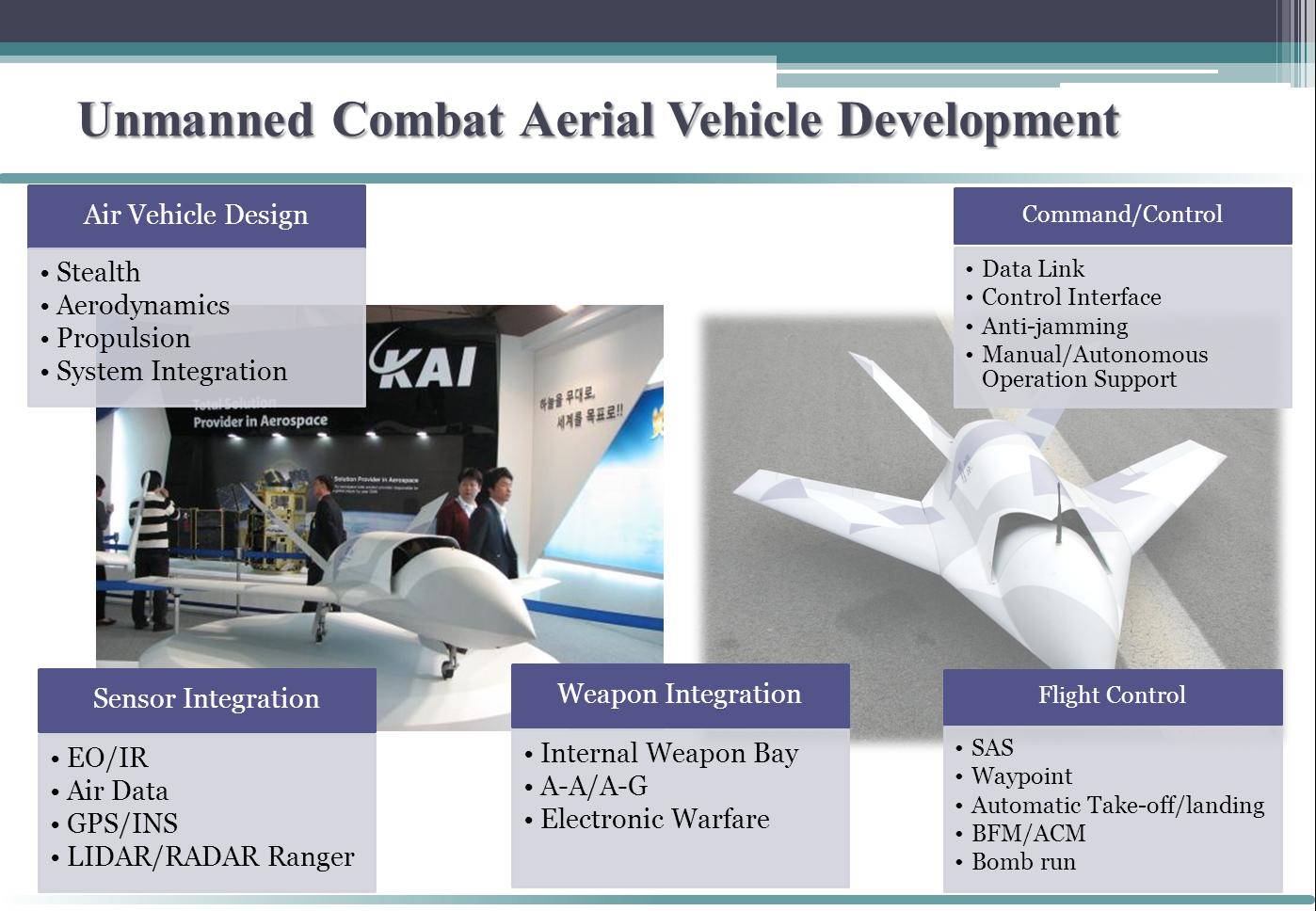
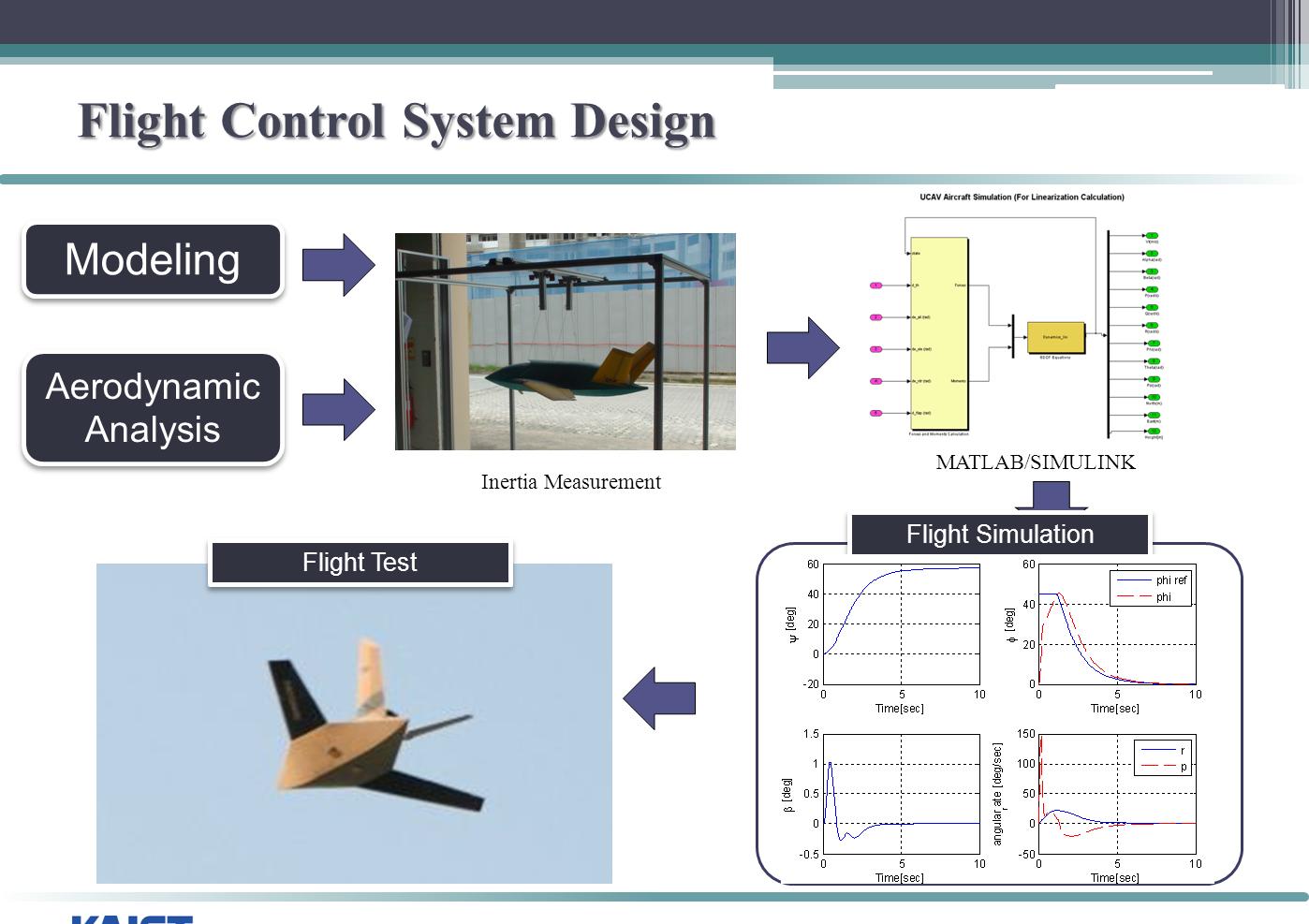
-
고정익 무인기의 영상기반 자동착륙
Vision-based landing for fixed-wing UAVs (September 2007~August 2009)In this project, awe develop cutting-edge sensing and guidance algorithms that allow the host vehicle to land safely to a shock-absorbing net with a visual marker. Such a feature is a great plus to enable safe operations during the landing stage, during which a high percentage of accidents occur in reality. I am in charge of the hardware, airframe, and control of the aircraft.
Since the beginning of the project, we have been able to come up with a slightly different idea of using an inflated airbag. This airbag not only helps to reduce the shock during the landing, but also serves as a visual marker that can be detected at a distance using a relatively simpler and more reliable algorithm. We have been able to validate our algorithm using visual feedback and successfully landed the vehicle at a very high success rate so far.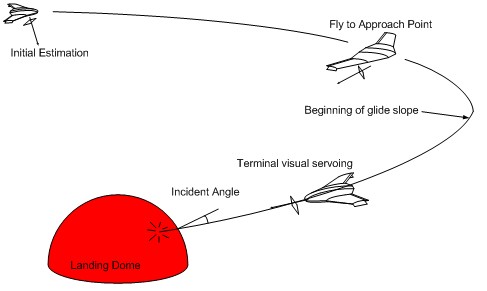






-
30kg 페이로드를 지닌 농약 살포, 농업용 무인 헬리콥터 개발
Development of Crop-dusting helicopter with 30kg payload (June 2007~May 2009)This is a project funded by Korean Ministry of Commerce, Industry, and Energy from June 2007. The objective is to develop a helicopter that can fly autonomously to perform crop dusting task with minimum involvement of ground crews, i.e., farmers. Therefore the system has to be reliable, efficient, and easy to use. The helicopter is equipped with inertial navigation system, GPS, laser altimeter, and other sensors to ensure safe operation. The ground system is designed to provide intuitive and informative user interface to the functialities of the designed system. This work is a joint work with Oneseen Skytech.

Oneseen Skytech X-Copter 1 
X-Copter 1Test Flight 
X-Copter 2 Test Flight Main Rotor Diameter 3135 mm Height 1180 mm Width 770 mm Powerplant watercooled 2cycle engine 24hp Operating time 60 min. Specification of X-Copter 1
-
연료전지를 이용한 장거리, 장시간 비행 무인기
Long-range, Long-endurance UAV powered by fuel cellThis research is for the development of unmanned aerial vehicles that are capable of long-endurance and long-distance missions using an advanced power technology currently under development in the Department of Aerospace Engineering at KAIST. Although traditional energy sources based on hydrocarbon have reasonably high energy densities, the overall efficiency is still far below an acceptable level and they are the primary cause of air pollution and greenhouse effects. On the contrary, the fuel cell generates electricity directly from the fuel without lossy combustion process. However, the conventional fuel cell technology typically uses pure hydrogen, which has to be compressed to a very high pressure or cooled to liquid state to meet the desired energy density. Such processes are prohibitively costly and hardly justifiable except for few applications such as spacecraft. Our fuel cell technology uses a liquid solution of hydrogen compound as the source of hydrogen and therefore the achievable energy density is significantly higher and the refueling and storage processes are much more convenient than conventional methods using pure hydrogen. Our proposed technology is therefore ideal for many power-demanding field systems including unmanned vehicles. Our UAV testbed is based on a blended wing-body platform, which has a very high lift-to-drag ratio, allowing a large payload weight and volume at a high efficiency. We are working on a long-rannge flight mission that can showcase the performance of our proposed UAV system... stay tuned!

Fuel Cell-based UAV in flight 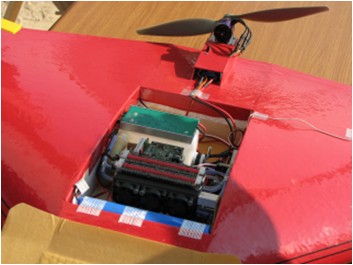
Fuel cell installed in UAV 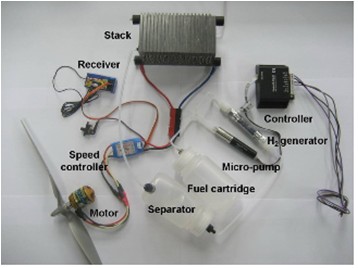
Anatomy of a Sodium Borotetrahydride fuel cell A test flight video can be found here (53MB).
-
GPS 기반 낙하산 제어
GPS-guided ParafoilIt is of high importance to guide a payload to a landing site at a greater accuracy. This task requires an active control and precision positioning system to guide the payload to reach the target point so that it can be used to deliver the supplies for soldiers in the battlefield or refugees in isolated areas. We consider a parafoil-based system because its airfoil-shaped canopy can generate a lift and steering capability instead of simply braking the descent as is the case with conventional parachutes. We have investigated various possibilities on the mechanism to effectively control the parafoil. We chose Global Positioning System (GPS) as the sole source of position measurement. We designed an algorithm to control the system only using the GPS data to guide the whole system to the target location. We validated this concept by developing flight control software in C++, integrated with a wireless communication system and a servo driver circuit. During flight tests, we used an electrically powered remote control helicopter to drop the parafoil system. A series of experiment show our parafoil control system could guide the payload to the prescribed location with a satisfactory accuracy.
Related paper:
Yeon-Deuk Jeong, Sang-Woo Moon, and Hyunchul Shim, "Development of a GPS-based Autonomous Parafoil Control System," KAIST-Kyushu University Joint Workshop, 2007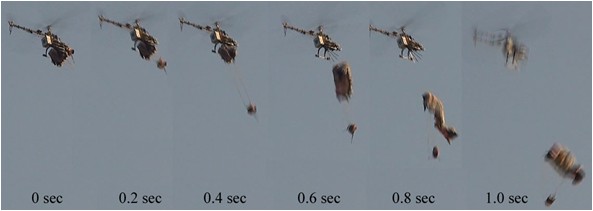
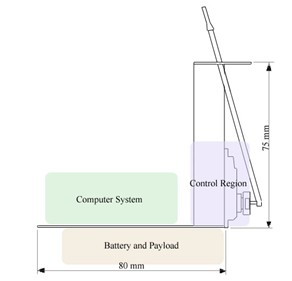
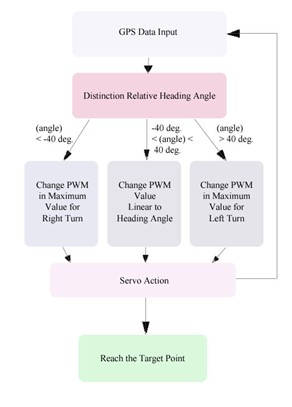
I have been involved in the Berkeley UAV research group, BEAR, since its beginning in 1996, under the guidance of Professor Shankar Sastry (Dean of Engineering at UCB as now). The followings are the achievements with my direct involvement.
-
무인기의 도시환경 속 장애물 회피
Obstacle Avoidance in Urban EnvrionmentSponsor: UCAR project, DARPA
Duraion: 2004The objective of this project is to provide a viable solution for autonomous flight in an environment with urban or natural obstacles. The obstacle avoidance problem is resolved by combining the model predictive control approach with the concept of potential field. The MPC algorithm with an efficient gradient-search based optimizer is capable of generating the collision-free trajectory in real time, unlike existing algorithms not capable of real-time trajectory replanning or handling three-dimensional environment. The adjacent obstacles are sensed with an onboard laser scanner, which provides a local obstacle map along the flight path with sufficient accuracy and reliability. Major accomplishments are 1) the development of real-time solver for the proposed MPC algorithm, 2) the effectiveness of the cost function formulation that accounts for obstacle avoidance and trajectory tracking and 3) obstacle sensing and local map building using onboard laser scanner. The proposed framework was successfully tested on a Berkeley UAV as shown in the figure below in a series of test flight, in which the RUAV flies close to the shortest path to the destination while reaming free from any collision with nearby obstacles.
Related Papers
D. Shim, H. Chung, H. J. Kim, S. Sastry, "Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles," accepted to AIAA GN&C Conference, San Francisco, August 2005.
D. H. Shim, H. J. Kim, S. Sastry, Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments In IEEE Conference on Decision and Control, December 2002.

Ground View 
Aerial View 
Laser scanning visualization I have been involved in the Berkeley UAV research group, BEAR, since its beginning in 1996, under the guidance of Professor Shankar Sastry (Dean of Engineering at UCB as now). The followings are the achievements with my direct involvement.
-
Perch-and-Move
Sponsor: PAM project, DARPA
Duration: 2003-2004
In this seedling project, BEAR team undertook a challenge to provide a UAV platform capable of performing a fully autonomous mission from take-off to land without any human assist. This goal calls for a vehicle with a powerplant that does not need any external help to start and stop. Conventional radio-controlled helicopters are based on four-stroke gasoline engine or glowplug engine, which all need external assist to start. Therefore, BEAR team chose an electric helicopter as the platform, which is powered by extremely large capacity lithium polymer batteries. (40V 8000mAh in total). The brushless DC motor with RPM governing is the perfect answer for our applications- fully remote start/stop operation is simply done by a flick on the transmitter. The vehicle performs, as shown in the video link below, fully autonomous take-off and landing repeatedly without any human aid that we need for gas-powered helicopters.

Front View 
Rear View 
Ursa Electra in Hover 
Group Photo with Dr. John Bay, the program manager The following link is a video of Ursa Electra 1, the world's first electric UAV with fully autonomous take-off to land capability: Click here
-
Aerial Pursuit-evasion Game
** this is an unfortunate research activity where my original input about using MPC for aerial pursuit-evasion game went uncredited...
Sponsor: Software Enabled Control (SEC), DARPA
Duration: 2004
This demonstration involved the development of a model predictive controller that tracked a final waypoint, as well as avoided a moving pursuit aircraft through the same controller. The timescale of this project was about 6 months. We successfully demonstrated the algorithms and code against a trained pilot, who was flying an F-15 (see videos below).Related Papers:
J. Mikael Eklund, Jonathan Sprinkle, S. Shankar Sastry, "Implementing and Testing a Nonlinear Model Predictive Tracking Controller for Aerial Pursuit Evasion Games on a Fixed Wing Aircraft", Proceedings of American Control Conference (ACC) 2005, (In Publication), Portland, OR, Jun., 8--10, 2005.
Jonathan Sprinkle, J. Mikael Eklund, H. Jin Kim, S. Shankar Sastry, "Encoding Aerial Pursuit/Evasion Games with Fixed Wing Aircraft into a Nonlinear Model Predictive Tracking Controller", IEEE Conference on Decision and Control, Submitted, Dec., 2004.
D. H. Shim, H. J. Kim, S. Sastry, Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments,?IEEE Conference on Decision and Control, December 2003.
Capture definitions for a pursuit/evasion game between fixed-wing aircraft (colloquially known as a dogfight). 
Arena of Pursuit-Evasion Games

This MPG movie is of a symmetric PEG between our UAV (Yellow) and our adversary F-15 (Blue), which is piloted by a human. 
This MPG movie is of a "chicken" game, where the adversary F-15 pulls out all the stops, and flies at maximum speed toward our speed-restricted aircraft, to see how long we can last before capture in a worst case scenario. Acknowledgment. This section is adapted from the original page by Jonathan Sprinkle. The original is found here
-
무인기의 충돌 회피
Collision Avoidance: UAVs playing chickenIn this research, the dynamic trajectory replanning in the event of possible mid-air collision is demonstrated. Each vehicle's flight control system is supervised with a online, fully decentralized trajectory generation based on model predictive control. Each vehicle boardcasts their current location. The proposed approach successfully finds safe paths for five helicopters in the simulation shown below. Encouraged by the simulation's outcome, we went ahead to try the idea on real Berkeley UAV platforms, each of which costs $100,000 (material only)!! So in total of $200,000 was set on a collision course. One can say we put two high-end Porches on a collision course and we hope our system can find safe paths to get these vehicles around each other without running into them. The two UAVs, Ursa Magna 1 and Magna 2, are set in an intentional head-on collision course. The trajectory planner based on model predictive control computes the trajectories for two UAVs, which minimize the given cost functions that penalize the proximity to other UAV and the deviation from the original course at the same time.
Upon the successful test, our daring experiment grabbed a lot of attention and Discovery Science channel was one of them. The film crew came out in May 2003 and flimed out experiment, as linked below.
Related Papers:
D. H. Shim, H. J. Kim, S. Sastry, 밆ecentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments,?IEEE Conference on Decision and Control, December 2003.
Original Flight Path 
Dynamically adjusted flight path Simulation Visualization 
This research was covered by Discovery Science Channel Canada in 2003, as can be seen in the follwing link:

-
무인기의 영상기반 자동착륙
Vision-based LandingSponsor: Dr. Alan Moshfegh, Office of Navy Research (ONR)
This project intends to deliver a technology that enables a rotorcraft-based UAV to land on a ship using its onboard vision system. It is well known that the landing of a helicopter on a ship deck is very difficult due to the relative motion between the helicopter and the ship deck on top of the underactuated nature of the helicopter control. A vision system is considered ideal due to the passive nature of sensing. In this work, a unique marker is conceived to provide the visual cue for relative attitude and distance. The helicopter uses its onboard camera and vision system to estimate the relative distance and rotation. The estimation is used to generate the landing profile.
Since the landing is always relative to the target location, which can be stationary or moving, it is more important to be able to estimate the relative distanceRelated papers:
O. Shakernia, C. S. Sharp, R. Vidal, Y. Ma, S. Sastry, "Multiple View Motion Estimation and Control for Landing an Unmanned Aerial Vehicle," International Conference on Robotics and Automation, 2002.
Test video -
Pursuit-Evasion Game
Sponsor: Army Research Office (MURI)
The goal of this research lies in the organization of multiple autonomous agents into organic intelligent systems with minimal supervision and cognition complexity, high-level of fault-tolerance, and maximized adaptivity to the changes in the task and the environment. The coordination of multi-agent system is architected as a set of distributed hierarchical hybrid systems, which emphasize the autonomy of each agent yet allows for coordinated team efforts. The proposed hierarchical structure transforms a highly complex large scale operation into a set of integrated and interactive modular functionals. For the validation of the effectiveness of the proposed framework, a multi-agent probabilistic pursuit-evasion game (PEG) between teams of UAVs and UGVs is chosen. Multi-agent PEG is a promising benchmark application for cooperative multi-robot systems in which a team of agents acting as pursers attempts to capture a group of evaders within a bounded but unknown environment. Since the full solution is often computationally infeasible in realistic situations, a number of suboptimal approaches are proposed: greedy policy and global-max policy. These proposed ideas were studied in simulations and compared in full experiments with Berkeley UAVs and UGVs.Related papers:
R. Vidal, O. Shakernia, H. J. Kim, H. Shim, S. Sastry, "Multi-Agent Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Transactions on Robotics and Automation, vol.18, no.5, pp. 662-669, October 2002
H. J. Kim, R. Vidal, D. H. Shim, O. Shakernia, S. Sastry, "A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Conference on Decision and Control, 2001

Click here to play a movie: