l 고기동성 무인 전투기의 근접 공중전을 위한 유도 제어 기법 연구
Research on Guidance and Control of Highly Maneuverable UCAVs in Dogfight
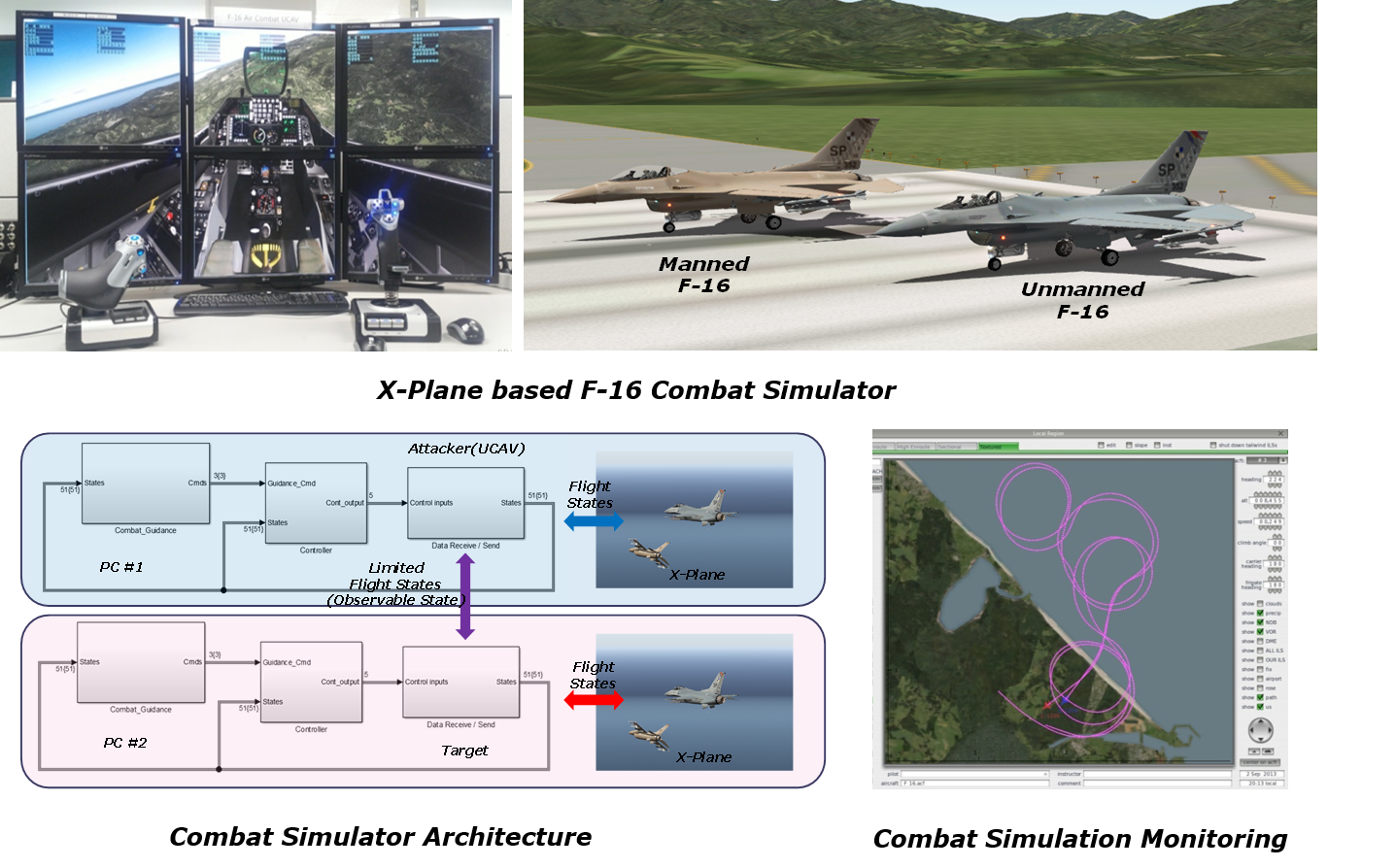
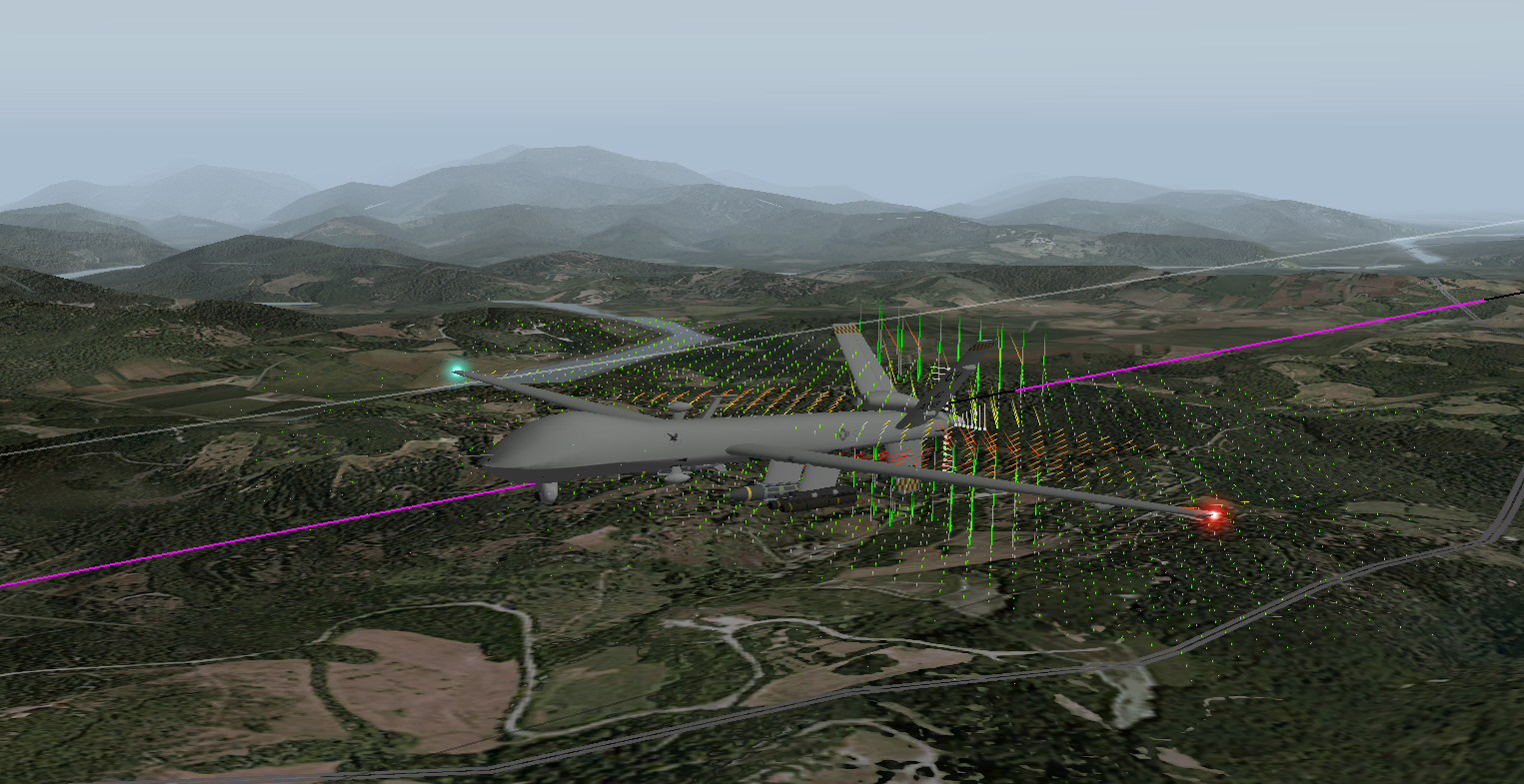
In this research, we aim to develop guidance algorithms that enable highly maneuverable unmanned combat aerial vehicles(UCAVs) equipped with thrust vectoring to engage a close-range aerial combat. The proposed three-dimensional guidance algorithm is complemented by a precision trajectory tracking, which is robust to damages or malfunctions of control surfaces or airframes. The proposed guidance and control algorithms will be validated in a series of high-fidelity nonlinear simulation using MATLAB and X-Plane and then real flight experiments with small-size UCAV test platform.
This project is funding by National Research Foundation (NRF) from 2011.
l소형 무인기를 이용한 제어 알리고즘 검증 비행시험 용역
Flight validation of control law using a small UAV
In this research, The stability and control augmentation system and longitudinal auto-landing guidance law, using Time Delay Control, is proposed and
evaluated through a simulation with model uncertainties and wind disturbances. And the TDC is validated by a series of flight experiments.
This project is funding by Korea Aerospace Research Institute(KARI) from 2010.
l
Tail-sitter방식 비행체 공력특성 및 제어기법 연구(ADD)
Study on Aerodynamic Characteristics and Control Law for a Tail-sitter
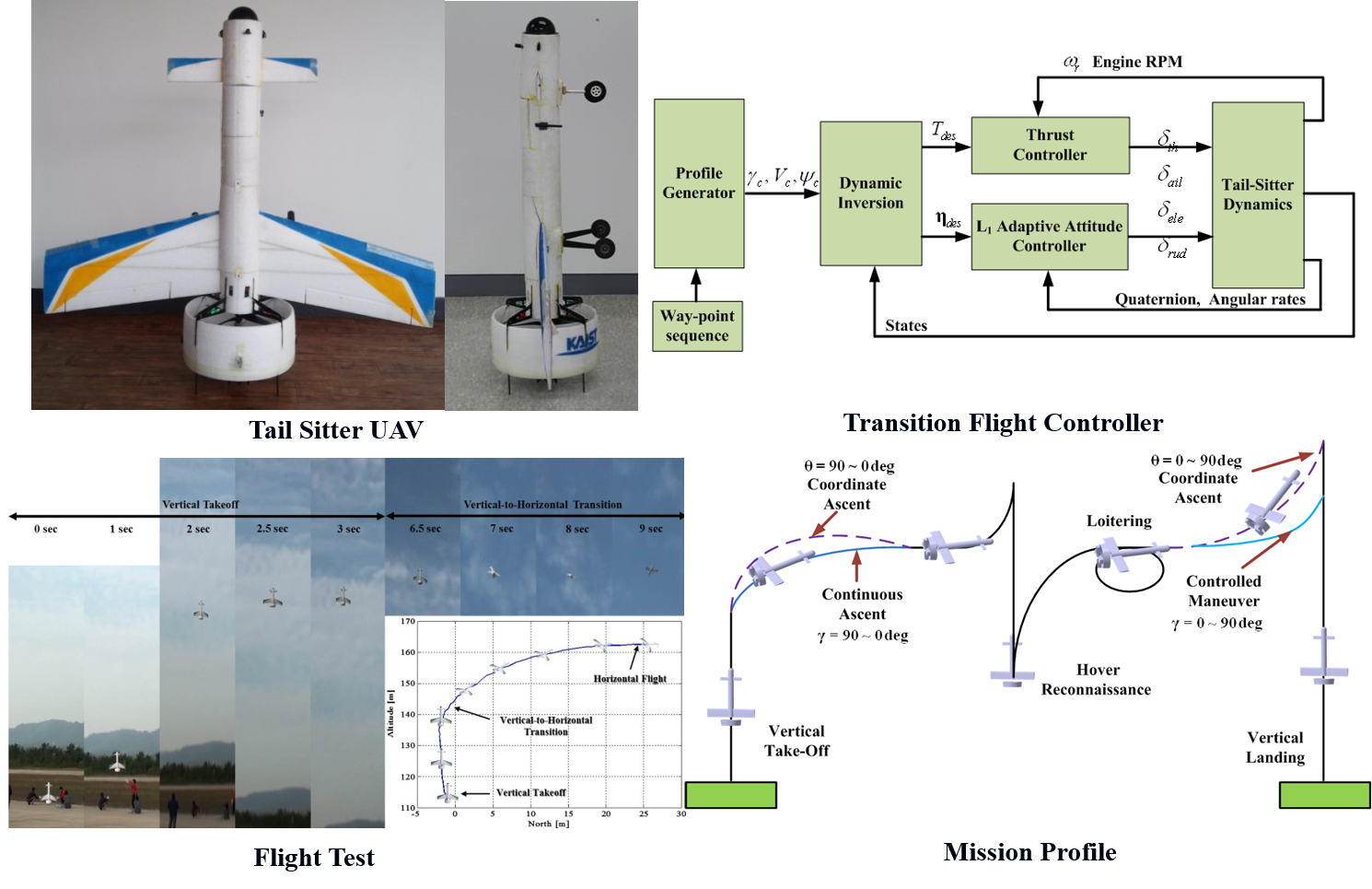
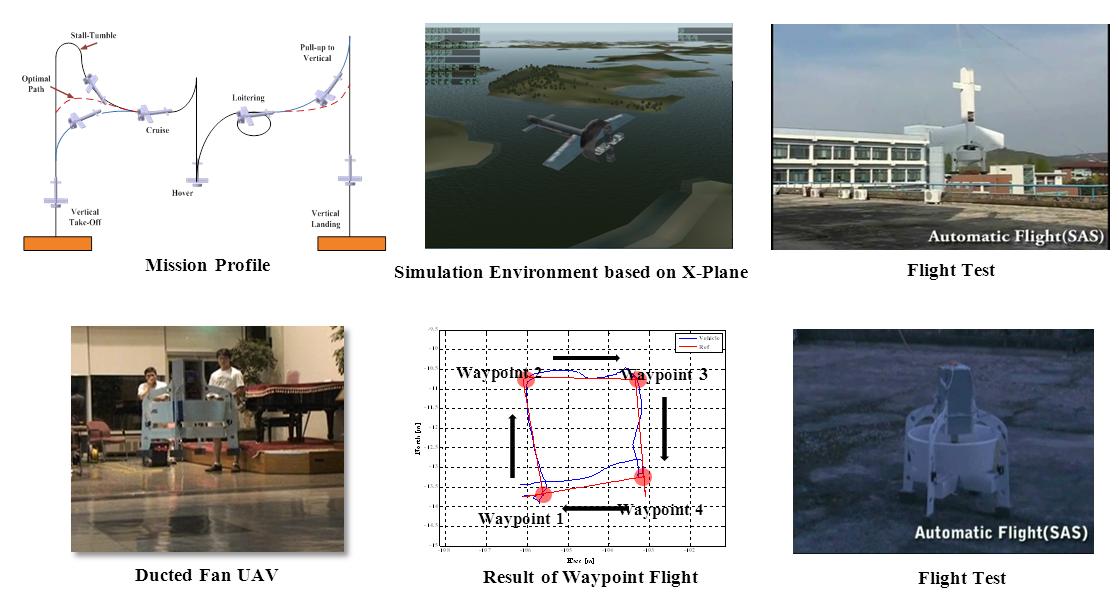
There have been ongoing interests in a type of aircraft that are capable of vertical take-off/landing (VTOL) for greater operability and high-speed horizontal flight capability for maximal mission range. A possible solution for such application is tail-sitters, which takes off vertically and transitions into a horizontal flight. During the entire mission of a tail-sitter from take-off to landing, it goes through largely varying dynamic characteristics. In this project, we propose a set of controllers for horizontal, vertical, and transition flight regimes. Especially, for transition, in conjunction with conventional multi-loop feedback, we use L1 adaptive control to supplement the linear controllers. The proposed controller were first validated with simulation models and then validated in actual flight tests to successfully demonstrate its capability to control the vehicle over the entire operating range.
l이종 자율 무인기 협업 체계 선행연구 , ADD
Cooperative System for Heterogeneous UAVs
Unmanned Aerial Vehicles(UAVs) have been performed important role in modern wars. Several countries including United States are accelerating developments on the unmanned aircraft systems while revealing their experimental works on the unmanned systems. Unmanned agents have been applied in many warfare situations such as reconnaissance, surveillance or retrieving land mines. In the future, however, multi and heterogeneous unmanned platforms will perform various cooperative tasks such as assault missions, which are managed by high-level commands from a commander. We are therefore doing a research on developing such a cooperative system for heterogeneous UAVs. We are focusing on designing a system to manipulate several fixed and rotary wing UAVs simultaneously in order to provide availability of cooperative missions.
l
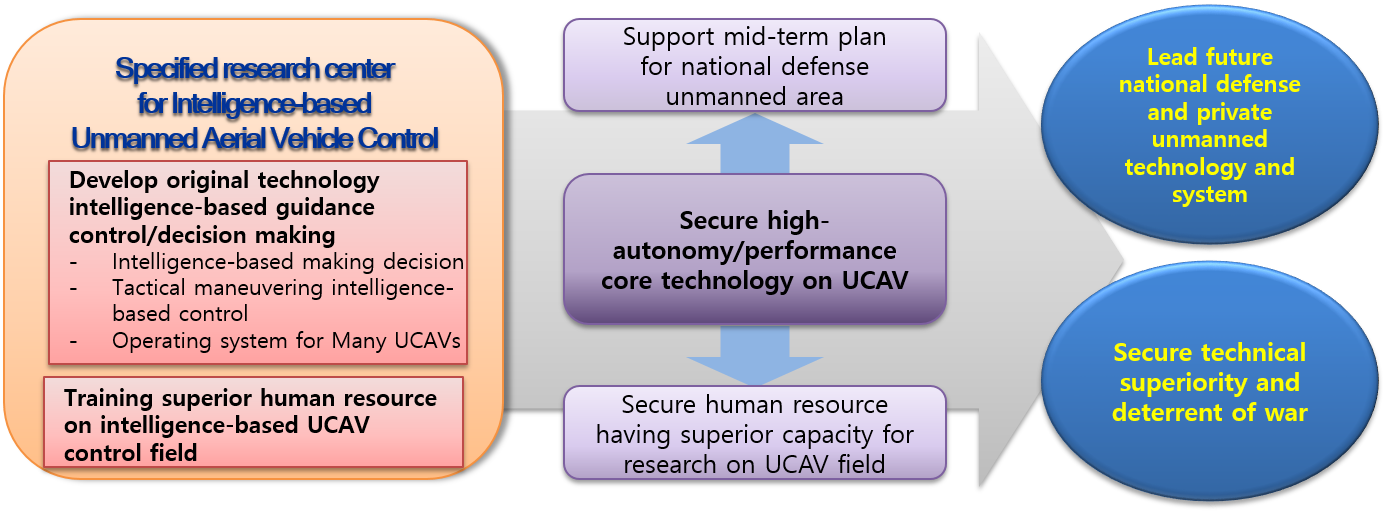
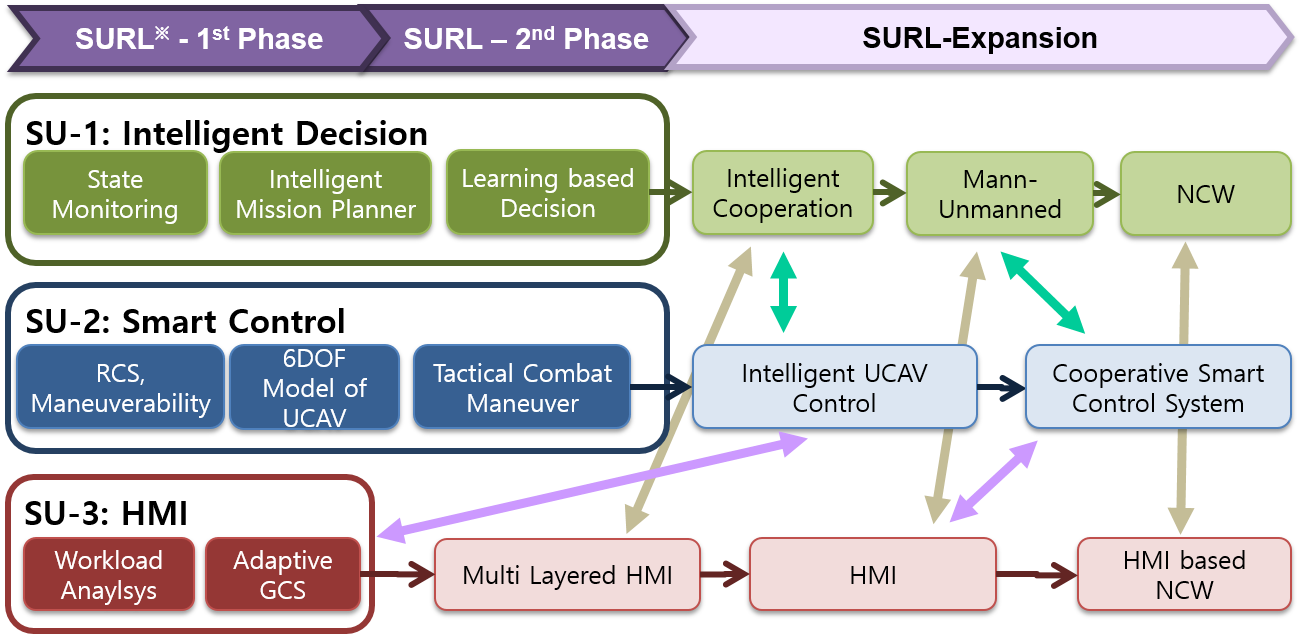
Intelligence-based Unmanned Aerial Vehicle Control Specified Research Center
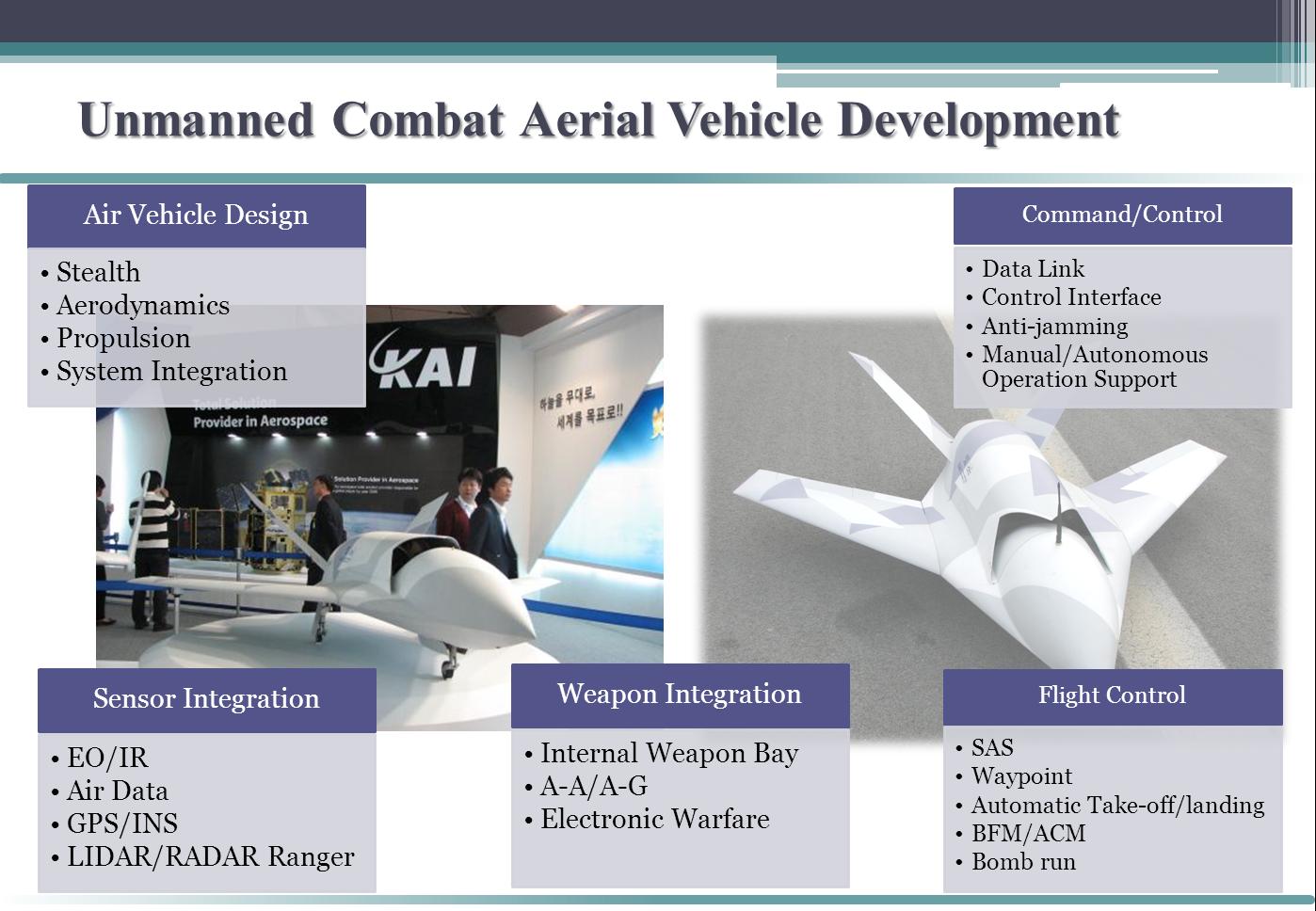
The aim of Intelligence-based Unmanned Aerial Vehicle Control Specified Research Center is developing the original technology of UCAV(Unmanned Aerial Combat Vehicle). Specified research center�s research objective is establishing the theoretical structures and related technology bases for single/multi UAV�s effective fulfillment of surveillance/reconnaissance/information gathering/ attack in future warfare. UAV used for reconnaissance and transportation conducts a key role in current warfare. In the near future, UAV is expected to play a key role in warfare by conducting missions such as destroying enemy�s air defense network, winning the air and other important tasks with sufficient maneuverability and attack ability. To reduce RCS(Radar Cross Section), UCAV requires specialized wing and body shape which causes instability of aircraft. Also, aerodynamic analysis of specialized wing and body is difficult. Thus, development of new smart flight control device, task design, decision making and effective ground system must be preceded for UCAV to be controlled stably and to perform attack missions which can be very complicating.
The specified research center�s key subjects of research are shape design of UCAV which has minimum RCS and to secure the original technology for smart guide control and decision making algorithm for improvement of performance ability. It is required to research the smart decision making algorithm, shape of UCAV for LPI(Low Probability of Intercept)/high agile maneuver, smart control system based on piloted handling and ground system for management of multiple UAV(Unmanned aerial vehicle).
The researches for UCAV have been conducted narrowly in South Korea. Thus, to secure technologies of related areas, establishment of specified research center for the development of UCAV technology and training of professional manpower was required. To meet these requirements, this specified research center conducts research on 3 detailed assignments. 3 detailed assignments are as follows;
SU-1 : A Study on Smart Decision Making Algorithm for Unmanned Air Vehicle
SU-2 : A Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle
SU-3 : A study on the technology of Human-Machine Interaction to reduce load of multiple UAV operator
SU-1 : A Study on Smart Decision Making Algorithm for Unmanned Air Vehicle
The purpose of a Study on Smart Decision Making Algorithm for Unmanned Aerial Vehicle is to develop smart decision making algorithm to improve the mission success rate in response to uncertain and dynamic using environment, risk elements and changing of aircraft�s condition. To achieve this purpose, study on study items, as follows, will be conducted.
> Study on decision making algorithm architecture of intelligent-UCAV
> Study on system monitoring algorithm of intelligent-UCAV
> Study on profile scheduling and task scheduling/re-scheduling algorithm
> Study on intelligent learning algorithm
SU-2 : A Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle
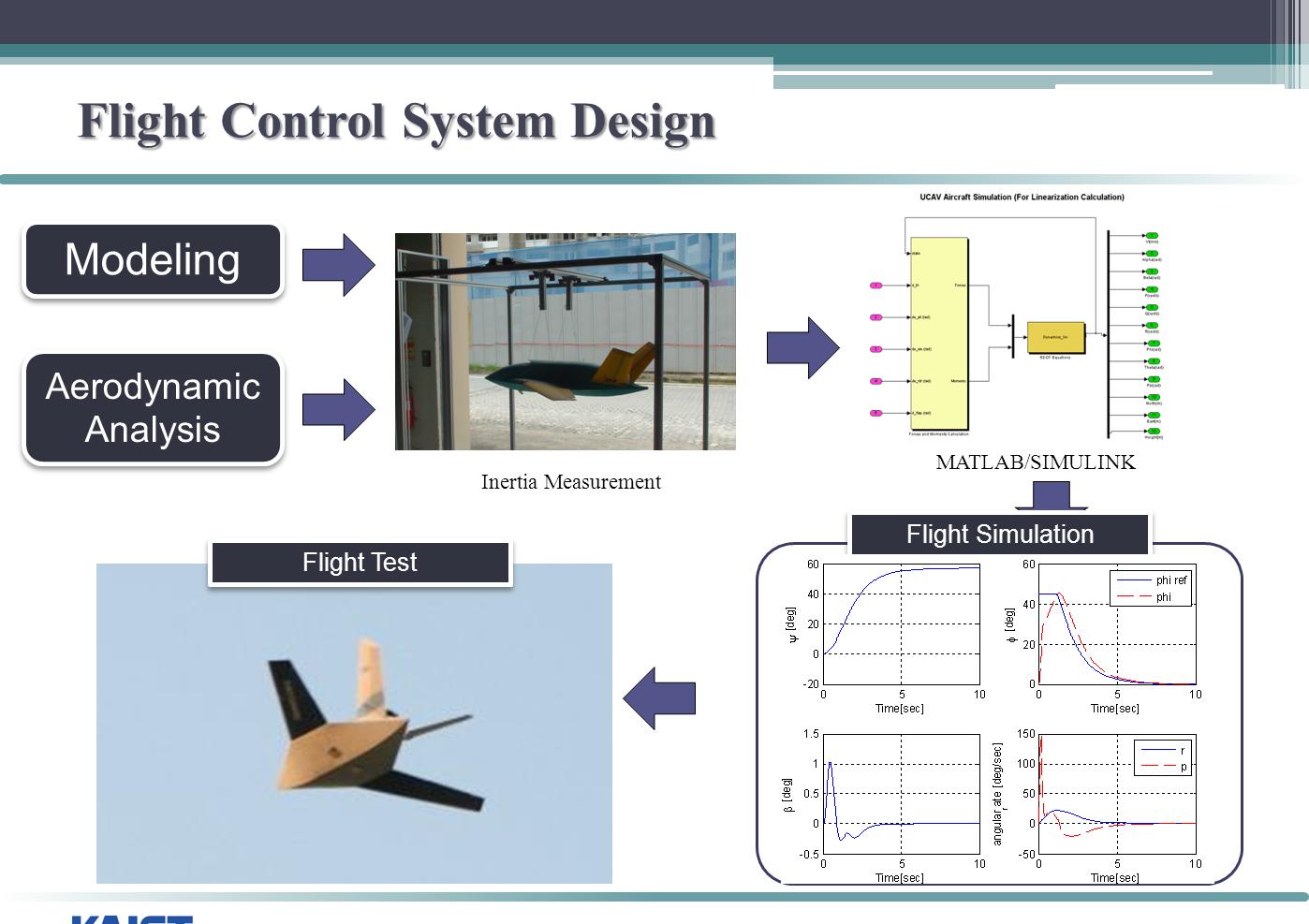
The purpose of a Study on Smart Control System for Air-Combat-Maneuvering of Unmanned Aerial Vehicle is designing UCAV�s shape satisfying LPI/High mobility and evaluating this design and then, using specified configuration, suggesting 6DOF(Degree Of Freedom) guidance model and designing intelligent control system based on piloted handling. To achieve this purpose, study on study items, as follows, will be conducted.
> Aerodynamic analysis for aircraft�s controllability and configuration design based on analysis of low RCS.
> Designing aerodynamic database about LPI configuration and constructing 6 DOF model for aerodynamic analysis and handling performance.
l무인자율주행자동차의 개발
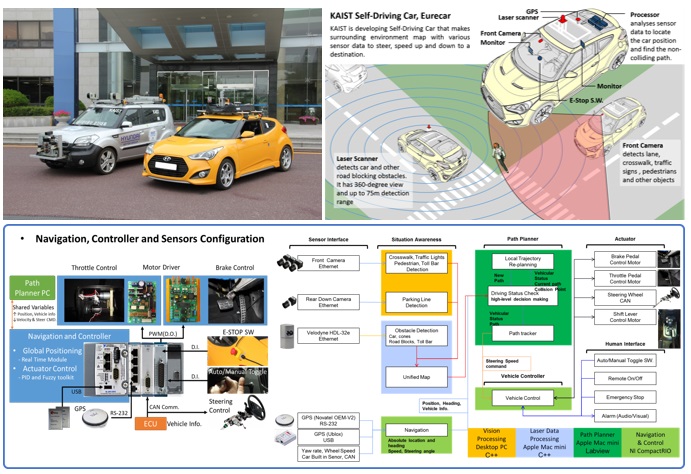
Unmanned Ground Vehicle / Autonomous Car
With Grand Challenge and Urban Challenge held by DARPA in 2004,2005,and 2007 and new car techonologies being introduced that provide drivers with safe and conveinent driving such as parking assistance, cruise control and lane keeping system, Autonomous Car became one of the most popular research area recently.
EURECAR, based on SOUL from Hyundai & KIA Motor Company, is our first autonomous vehicle developed. It can travel without any human control using GPSs and an INS for localization, vision sensors including cameras and laser scanners for local localization and obstacle detection, path-planning algorithms to generate a path that should be tracked, and actuators and their controllers to track the path with good performance. A new version of EURECAR (isn't named yet) with better performance is being developed based on Veloster Turbo also from Hyundai & KIA.
l 복수무인기의 분산시스템 연구 , ADD, 2009 ~ 2011 A Study on a Swarm of Distributed Unmanned Aerial Vehicles
Future combat system will be carried out by a large number of heterogeneous groups of both manned and unmanned sub-systems, which interact one another in systematic, hierarchical, and highly organic manners, so that a mission can be carried out with minimal collateral damage while maximizing the outcome. Therefore, future warfare will be carried out by groups of hierarchical and organically integrated manned and unmanned groups and therefore research on the integration and operation of heterogeneous multi-agent system must be preceded. Multi-agent scenarios require more sophisticated and flexible operation techniques to adapt to complex and less-predictable situations than conventional single-agent-based approaches. Before each mission, the given mission is analyzed, planned, allocated to the participating agents and then individual path for each agent is planned to the best knowledge available. During the mission, each UAV avoids collision with other agents and other obstacles by dynamically replanning their paths using the map augmented using the sensor measurement. Participating UAVs need to cooperate and synchronize their actions based on the information collected, processed, inferred, and shared. Their missions are then replanned and reassigned in order to adapt to the changes of the surroundings and thus maximize the mission effectiveness.
In this research, we aim to deliver a set of field-deployable research outcomes for the development of distributed multi-UAV system, which is an indispensible component of future network-centric warfare system. We pursue such a goal by researching on the component technologies for efficient operation of multiple UAVs, namely mission planning/assignment, information fusion and inference, dynamic mission allocation, and path planning. The research outcomes on these component technologies will be then integrated, implemented, and validated in a series of simulations and experiments.
l Micro Flap를 이용한 조종성증대 및 Micro Fin을 이용한 유동제어(아음속) 항력감소 연구,
한화구미사업장 ,2010~2013
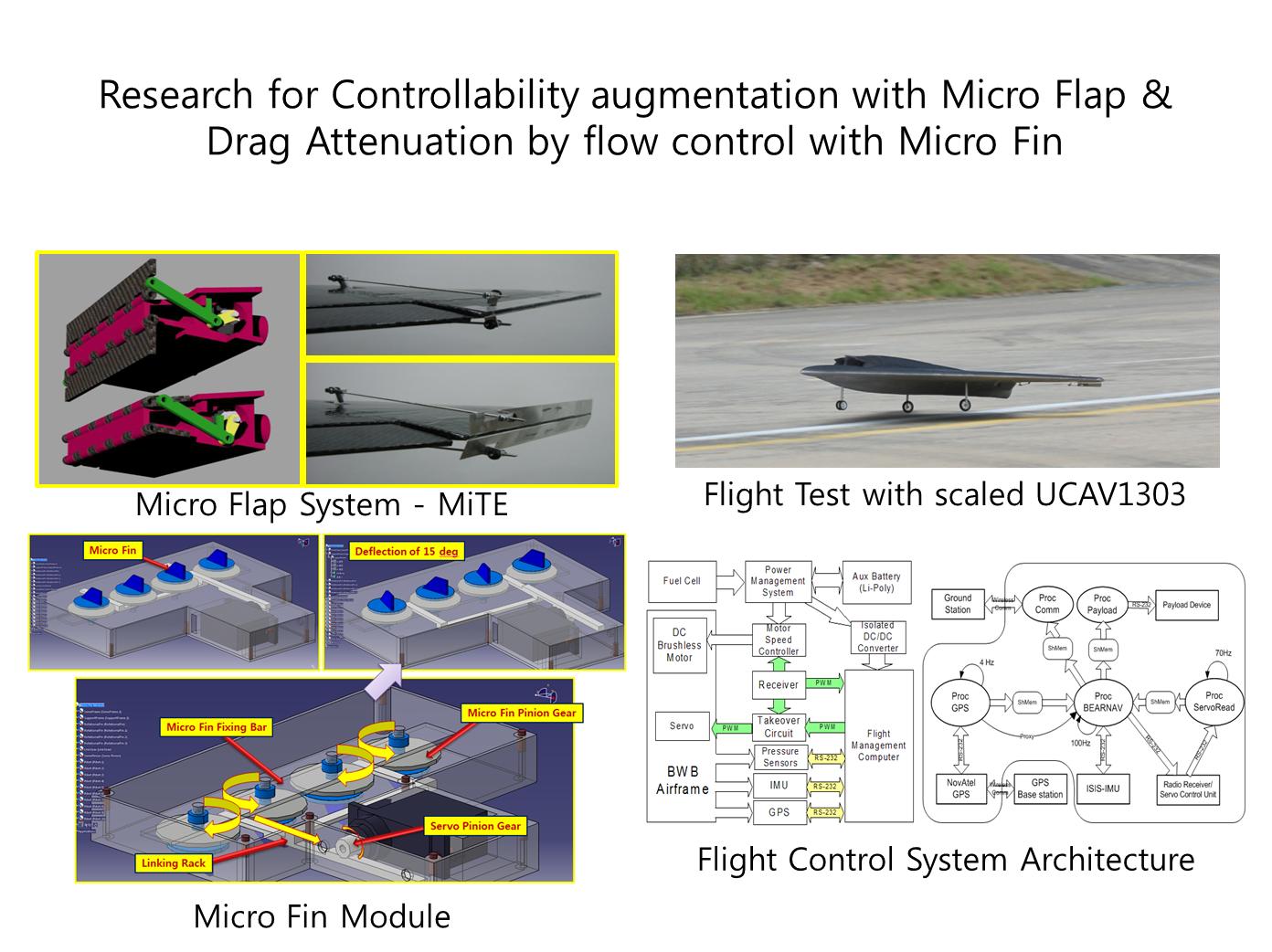
A Study on Controllability augmentation with Micro Flap & Drag Attenuation by flow control with Micro Fin
- Micro Fin System
Flow on the airfoil section in a wing is separated earlier as the angle of attack is increased. And the wake after separation makes the drag force bigger so that the more energy is needed to be used for the flight at high angle of attack. This project researches on the reduction of the drag force using vortex generator like Micro Fin to delay the separation even at high angle of attack.
- Micro Flap System
A Blended Wing Body(so called, BWB, Flying Wing or Zagi) aircraft doesn’t have any lateral directional control surfaces like vertical fin, and can’t assure that directional stability so that has adverse yaw and large dutch roll dynamic characteristics. This point makes the aircraft have little controllability in that direction. This low stability & controllability in the direction is critical to UCAV(Unmanned Combat Aerial Vehicle) of that type and of course, should be ensured. This project studies on the augmentation of controllability of UCAV(or normal UAV) of that type using the Micro Flap which is a control surface for the yaw direction.
l산업용 필드로봇 개발 : 채굴용 자동 소형 채탄기 개발 , 중소기업청 , 2009~2010 Development of a field robot : Autonomous explorating and mining robot in extremely harsh environment
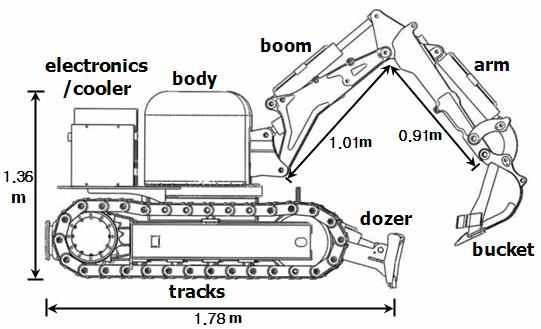
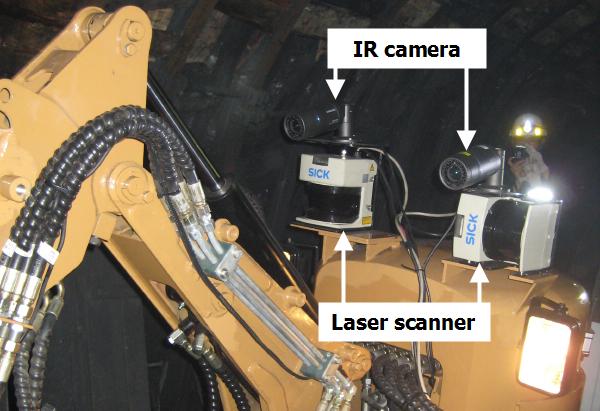
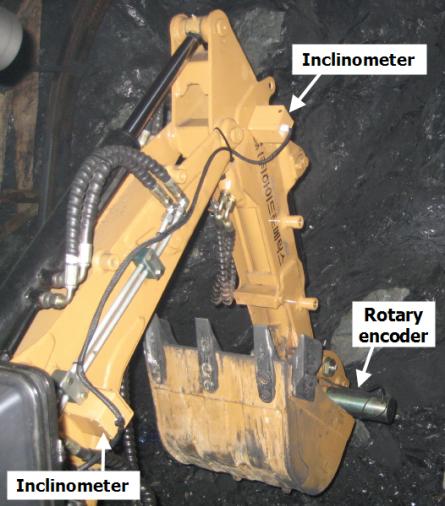
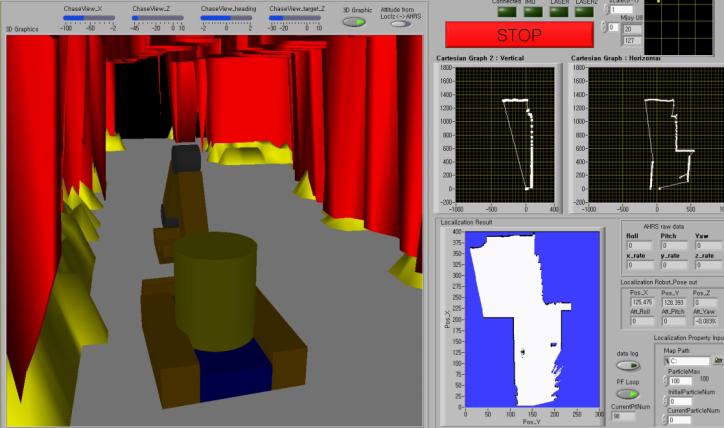
We are developing a mining robot works in underground coal mine has extremely harsh environment to human workers. The robot has to maintain its mechanical reliability under high temperature, high humidity, and lots of dust in the air. Also, the robot can measure the environment map and localize itself by fusing heterogeneous sensors such as stereo camera, laser scanner, and inertial measurement unit. Measured data analyzed intellectually is transmitted to human in the remote control room, so that the human worker could control the robot easily using virtual reality technology and force feedback joysticks. Therefore, development of this mining robot will surely contribute to make a safe workspace for human and to decrease the ratio of industrial accident. In addition, it can increase the productivity of underground resources and resolve the suffering from shortage of labor caused by avoiding 3D works.
<Photo of mine exploring robot >
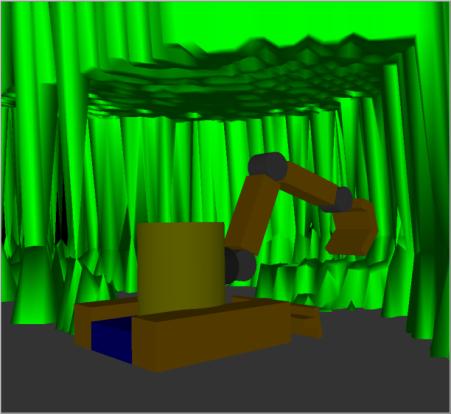
< Experiment : Monte Carlo Localization using Particle Filter >
l
극한환경 인식을 위한 Sensor Fusion 및 Localization 기술과 개발 시제품의 내환경성 및 신뢰성 평가기술 개발 , 지식경제부 , 2009~2011
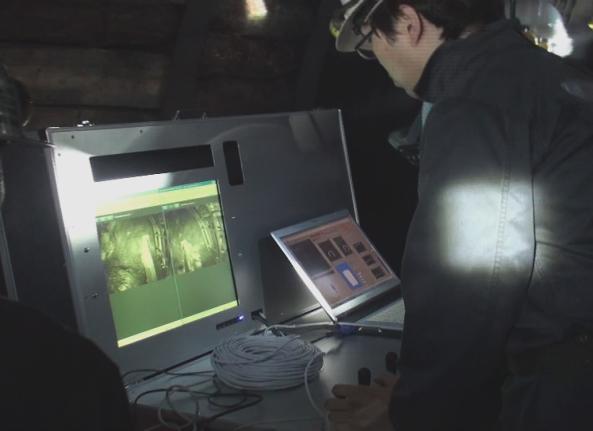
The typical underground coal mine in Korea is an extremely harsh environment for workers due to high temperature, humidity, and harmful dusts. In such environment, a remotely operated robot can be of great help to alleviate the work load of miners. As a joint effort, KAIST, Hydraumatics Co., and Korea Coal Corporation have developed a mining robot and a tele-operation system to operate the robot from a safe remote place. In this research, we are developing the robot mechanism and the sensing algorithms for localization and elevation mapping. The robot is hydraulically powered to drive the track and the cylinders in the excavation mechanism. The robot is equipped with two cameras, two laser scanners, and many other sensors so that the human operator can perform various tasks such as shoveling and breaking at a remotely located console. The data from various sensors are fused together to provide the human operators with enhanced visual cues as well as the pose information of the robot and its boom/arm/bucket linkage. The robot has been recently deployed in an active coal mine to evaluate its effectiveness in the real environment and demonstrated its feasibility as a viable aid to assist mining workers.
l고세장비 유연날개 비행체 공탄성 해석기법 연구 , ADD, 2009~2011
A Study on Aeroelastic Analysis Technique for Aircraft with High Aspect Ratio Flexible Wing
Aircraft are inherently flexible and flexibility can be used to advantage as a design feature for improved performance. Flexible aircraft are subject to interaction between flight mechanics, structural dynamics, and flight control system dynamics. Aeroservoelastic instability can lead to disastrous failures in aircraft as was recently the case for several aircraft. These problems are very similar to flutter accidents which occurred two decades age.
Aeroservoelasticity(ASE) is a multidisciplinary technology dealing with the interaction of the aircraft’s flexile structure, the steady and unsteady aerodynamic forces resulting from the aircraft motion, and the flight control systems. Detailed and quite complex mathematical models are required to accurately predict” ASE interactions” and to design active control systems for flexible vehicle applications.
A compatible mathematical model of the coupled dynamics of flight mechanics, flight control, and structural dynamics must be established. Such models(using the time and frequency domain descriptions) are available in the aeroelastic analysis for aircraft with high aspect ratio flexible wing to assist in the design and clearance of flight control systems. Therefore, the aeroelastic analysis technique for aircraft with high aspect ratio flexible wing, and its use in aircraft design applications are studying.
Examples of High aspect ratio flexible wing (Accident scene of Helios & Global Hawk )
l 영상기반 충돌회피 기술연구, 한국항공우주연구원, 2010 ~ 2012
Tail-sitter의 자동 비행 연구 및 개발 , ADD
A study on vision sensor based collision avoidance, KARI, 2010 ~ 2012S
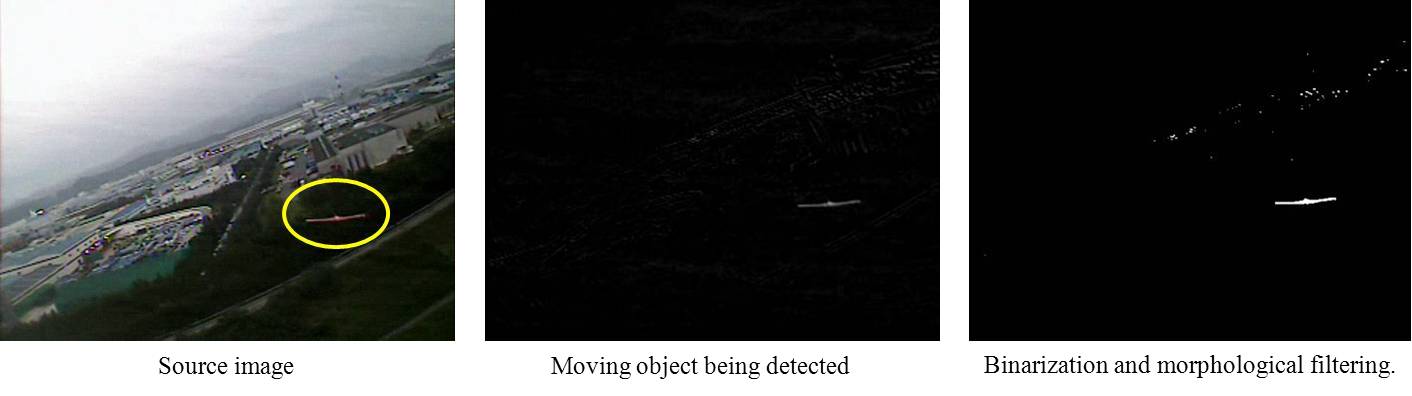
To employ unmanned aerial vehicles into same airspace with manned aircraft in near future, collision avoidance algorithm for UAV with safety certification will be needed. When other cooperative avoidance systems fail or are not supported, non-cooperative avoidance systems, called sense-and-avoid algorithm such as using radar and camera should be used for detecting and tracking opponent aircraft approaching into UAV's protected volume.
In this research, we develop algorithms and system for collision avoidance of aircraft via vision sensor technology. Various image processing methods and Support Vector Machine (SVM), Kalman filter are used for target detecting and tracking. This Information of target is used for collision avoidance algorithm such as Model Predictive Control (MPC) or potential function approach. Finally, the validation experiments of algorithm for UAV system will be conducted.
l Tail-sitter의 자동 비행 연구 및 개발 , ADD
Study on Aerodynamic Characteristics and Control law for a Tail Sitter
The objective of this project is to develop tail-sitter UAV which is complement defects of the existing reconnaissance UAV. The fixed-wing UAV can’t acquire clear imagery intelligence and the rotorcraft can’t approach operation area quickly due to slow cruise speed. Tail-sitter UAVs have vertical capability of a helicopter and the speed comparable to a fixed-wing airplane.
During the take-off phase, the aircraft climb up to adequate altitude vertically. Then, it goes from vertical to horizontal flight. This process is called the transition flight. After transition, the aircraft flies horizontally just like a fixed wing airplane. T he vehicle regains a vertical attitude via the transition flight and then descends slowly to land. Therefore, we research configuration design and multi-mode controller which consist of hover, transition, and cruise to develop tail-sitter UAV.
l 고기동성 무인 전투기의 근접 공중전을 위한 유도 제어 기법 연구
Research on Guidance and Control of Highly Maneuverable UCAVs in Dogfight
In this research, we aim to develop guidance algorithms that enable highly maneuverable unmanned combat aerial vehicles(UCAVs) equipped with thrust vectoring to engage a close-range aerial combat. The proposed three-dimensional guidance algorithm is complemented by a precision trajectory tracking, which is robust to damages or malfunctions of control surfaces or airframes. The proposed guidance and control algorithms will be validated in a series of high-fidelity nonlinear simulation using MATLAB and X-Plane and then real flight experiments with small-size UCAV test platform.
This project is funding by National Research Foundation (NRF) from 2011.
l소형 무인기를 이용한 제어 알리고즘 검증 비행시험 용역 Flight validation of control law using a small UAV
In this research, The stability and control augmentation system and longitudinal auto-landing guidance law, using Time Delay Control, is proposed and
evaluated through a simulation with model uncertainties and wind disturbances. And the TDC is validated by a series of flight experiments.
This project is funding by Korea Aerospace Research Institute(KARI) from 2010.
lMUAV 자동이착륙 설계기법 연구 , ADD, 2009~2010
A Study on Automatic Landing and Take-off Control Law Design
The objective of this project which is funded by ADD (Agency for Defense Development) is to design and develop robust and precision guidance and control law for ATOL (Automatic Take-Off and Landing) of MUAV(Medium-altitude long endurance Unmanned Aerial Vehicle) against external disturbances such as wind shear, turbulence and gust. Due to its high aspect-ratio and long wing span, the ATOL system has to consider its aerodynamic and structural characteristics such as Aeroservoelasticity (ASE) and limits of maneuverability in roll during the landing and take-off.
l현대자동차 무인차량 대회 : 무인차량의 자동주행 연구 , 현대 .기아 자동차 , 2009~2010
A study on Autonomous Drive for Unmanned Ground Vehicle.
Unmanned technology for almost all forms of transportation (vehicle) such as aerial, ground, and under water vehicles was applied and used for a variety of missions. In the near future, the intelligent unmanned technology is expected to be developed for the unique mission to perform alone, or coordination with the other systems.
Unmanned autonomous ground vehicles create and follow the path for the given waypoints to reach the target area by considering unpredictable internal and external problems. It’s difficult to predict Kinematic / Dynamic constraints unless the vehicle drives mileage and a spacious flat with no obstacles. Therefore, the autonomous systems are required collect information through a number and various kinds of sensors (sensor fusion), reconstruct the environment, generate the safe path and track the path in a predictable time. Especially high-level reasoning skills are required that consider uncertainties and obey traffic laws while driving in the real world.
1st unmanned self-driving vehicle competition will be held under the auspices of the HYUNDAI mobile. The goal is to develop the self-driving car (figure) obeys fair rules and regulations as well as avoid different variety of the obstacles in the road.
l한국형 무인전투기 개념연구 및 시범기 개발을 위한 2차년도 개발 용역 , KAI, 2008~2009
This project is a subscale aircraft, K-UCAV which was funded by Korea Aerospae Indeustries(KAI) to conduct air-to-air and air-to-ground missions, including suppression of enemy air defenses. The plane is 20% scale-down model of the K-UCAV that it has built to validate the aerodynamic aspects of its design.The main wing is the type of low-wing with sweepback angle and taper and tail wing is the V-tail type.
l 고정익 무인기의 영상기반 자동착륙
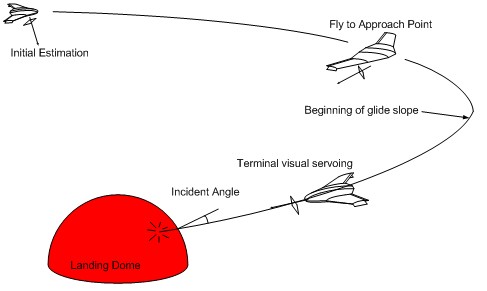
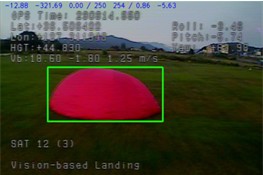
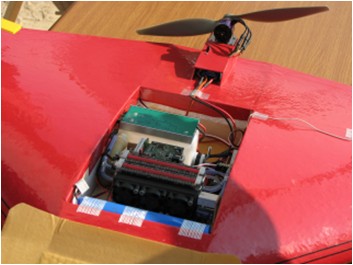
Vision-based landing for fixed-wing UAVs (September 2007~August 2009)
In this project, awe develop cutting-edge sensing and guidance algorithms that allow the host vehicle to land safely to a shock-absorbing net with a visual marker. Such a feature is a great plus to enable safe operations during the landing stage, during which a high percentage of accidents occur in reality. I am in charge of the hardware, airframe, and control of the aircraft.
Since the beginning of the project, we have been able to come up with a slightly different idea of using an inflated airbag. This airbag not only helps to reduce the shock during the landing, but also serves as a visual marker that can be detected at a distance using a relatively simpler and more reliable algorithm. We have been able to validate our algorithm using visual feedback and successfully landed the vehicle at a very high success rate so far.
l 30kg 페이로드를 지닌 농약 살포, 농업용 무인 헬리콥터 개발
Development of Crop-dusting helicopter with 30kg payload (June 2007~May 2009)
This is a project funded by Korean Ministry of Commerce, Industry, and Energy from June 2007. The objective is to develop a helicopter that can fly autonomously to perform crop dusting task with minimum involvement of ground crews, i.e., farmers. Therefore the system has to be reliable, efficient, and easy to use. The helicopter is equipped with inertial navigation system, GPS, laser altimeter, and other sensors to ensure safe operation. The ground system is designed to provide intuitive and informative user interface to the functialities of the designed system. This work is a joint work with Oneseen Skytech.
l 연료전지를 이용한 장거리, 장시간 비행 무인기
Long-range, Long-endurance UAV powered by fuel cell
This research is for the development of unmanned aerial vehicles that are capable of long-endurance and long-distance missions using an advanced power technology currently under development in the Department of Aerospace Engineering at KAIST. Although traditional energy sources based on hydrocarbon have reasonably high energy densities, the overall efficiency is still far below an acceptable level and they are the primary cause of air pollution and greenhouse effects. On the contrary, the fuel cell generates electricity directly from the fuel without lossy combustion process. However, the conventional fuel cell technology typically uses pure hydrogen, which has to be compressed to a very high pressure or cooled to liquid state to meet the desired energy density. Such processes are prohibitively costly and hardly justifiable except for few applications such as spacecraft. Our fuel cell technology uses a liquid solution of hydrogen compound as the source of hydrogen and therefore the achievable energy density is significantly higher and the refueling and storage processes are much more convenient than conventional methods using pure hydrogen. Our proposed technology is therefore ideal for many power-demanding field systems including unmanned vehicles. Our UAV testbed is based on a blended wing-body platform, which has a very high lift-to-drag ratio, allowing a large payload weight and volume at a high efficiency. We are working on a long-rannge flight mission that can showcase the performance of our proposed UAV system... stay tuned!
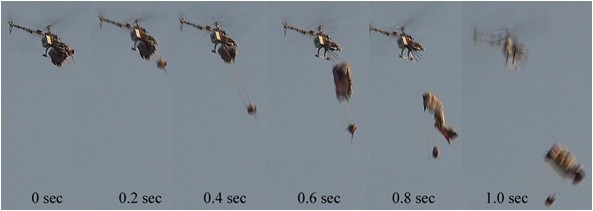
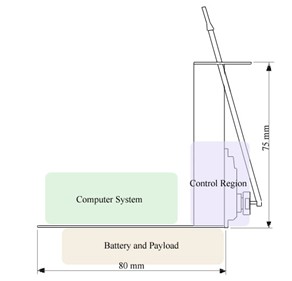
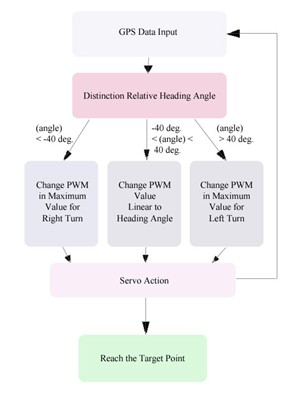
It is of high importance to guide a payload to a landing site at a greater accuracy. This task requires an active control and precision positioning system to guide the payload to reach the target point so that it can be used to deliver the supplies for soldiers in the battlefield or refugees in isolated areas. We consider a parafoil-based system because its airfoil-shaped canopy can generate a lift and steering capability instead of simply braking the descent as is the case with conventional parachutes. We have investigated various possibilities on the mechanism to effectively control the parafoil. We chose Global Positioning System (GPS) as the sole source of position measurement. We designed an algorithm to control the system only using the GPS data to guide the whole system to the target location. We validated this concept by developing flight control software in C++, integrated with a wireless communication system and a servo driver circuit. During flight tests, we used an electrically powered remote control helicopter to drop the parafoil system. A series of experiment show our parafoil control system could guide the payload to the prescribed location with a satisfactory accuracy.
Related paper:
Yeon-Deuk Jeong, Sang-Woo Moon, and Hyunchul Shim, "Development of a GPS-based Autonomous Parafoil Control System," KAIST-Kyushu University Joint Workshop, 2007
I have been involved in the Berkeley UAV research group, BEAR, since its beginning in 1996, under the guidance of Professor Shankar Sastry (Dean of Engineering at UCB as now). The followings are the achievements with my direct involvement.
l무인기의 도시환경 속 장애물 회피
Obstacle Avoidance in Urban Envrionment
Sponsor: UCAR project, DARPA
Duraion: 2004
The objective of this project is to provide a viable solution for autonomous flight in an environment with urban or natural obstacles. The obstacle avoidance problem is resolved by combining the model predictive control approach with the concept of potential field. The MPC algorithm with an efficient gradient-search based optimizer is capable of generating the collision-free trajectory in real time, unlike existing algorithms not capable of real-time trajectory replanning or handling three-dimensional environment. The adjacent obstacles are sensed with an onboard laser scanner, which provides a local obstacle map along the flight path with sufficient accuracy and reliability.
Major accomplishments are 1) the development of real-time solver for the proposed MPC algorithm, 2) the effectiveness of the cost function formulation that accounts for obstacle avoidance and trajectory tracking and 3) obstacle sensing and local map building using onboard laser scanner. The proposed framework was successfully tested on a Berkeley UAV as shown in the figure below in a series of test flight, in which the RUAV flies close to the shortest path to the destination while reaming free from any collision with nearby obstacles.
Sponsor: PAM project, DARPA
Duration: 2003-2004
In this seedling project, BEAR team undertook a challenge to provide a UAV platform capable of performing a fully autonomous mission from take-off to land without any human assist. This goal calls for a vehicle with a powerplant that does not need any external help to start and stop. Conventional radio-controlled helicopters are based on four-stroke gasoline engine or glowplug engine, which all need external assist to start. Therefore, BEAR team chose an electric helicopter as the platform, which is powered by extremely large capacity lithium polymer batteries. (40V 8000mAh in total). The brushless DC motor with RPM governing is the perfect answer for our applications- fully remote start/stop operation is simply done by a flick on the transmitter. The vehicle performs, as shown in the video link below, fully autonomous take-off and landing repeatedly without any human aid that we need for gas-powered helicopters.
Front View
Rear View
Ursa Electra in Hover
Group Photo with Dr. John Bay, the program manager
The following link is a video of Ursa Electra 1, the world's first electric UAV with fully autonomous take-off to land capability: Click here To the Top
l Aerial Pursuit-evasion Game
** this is an unfortunate research activity where my original input about using MPC for aerial pursuit-evasion game went uncredited...
Sponsor: Software Enabled Control (SEC), DARPA
Duration: 2004
This demonstration involved the development of a model predictive
controller that tracked a final waypoint, as well as avoided a
moving pursuit aircraft through the same controller. The timescale
of this project was about 6 months. We successfully demonstrated
the algorithms and code against a trained pilot, who was flying
an F-15 (see videos below).
Related Papers:
J. Mikael Eklund, Jonathan Sprinkle, S. Shankar Sastry, "Implementing and Testing a Nonlinear Model Predictive Tracking Controller for Aerial Pursuit Evasion Games on a Fixed Wing Aircraft", Proceedings of American Control Conference (ACC) 2005, (In Publication), Portland, OR, Jun., 8--10, 2005.
Jonathan Sprinkle, J. Mikael Eklund, H. Jin Kim, S. Shankar Sastry, "Encoding Aerial Pursuit/Evasion Games with Fixed Wing Aircraft into a Nonlinear Model Predictive Tracking Controller", IEEE Conference on Decision and Control, Submitted, Dec., 2004.
D. H. Shim, H. J. Kim, S. Sastry, �Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments,?IEEE Conference on Decision and Control,
December 2003.
Capture definitions for a pursuit/evasion game between fixed-wing aircraft (colloquially known as a dogfight).
Arena of Pursuit-Evasion Games
This MPG movie is of a symmetric PEG between our UAV (Yellow) and our adversary F-15 (Blue), which is piloted by a human.
This MPG movie is of a "chicken" game, where the adversary F-15 pulls out all the stops, and flies at maximum speed toward our speed-restricted aircraft, to see how long we can last before capture in a worst case scenario.
Acknowledgment. This section is adapted from the original page by Jonathan Sprinkle. The original is found here. To the Top
l무인기의 충돌 회피
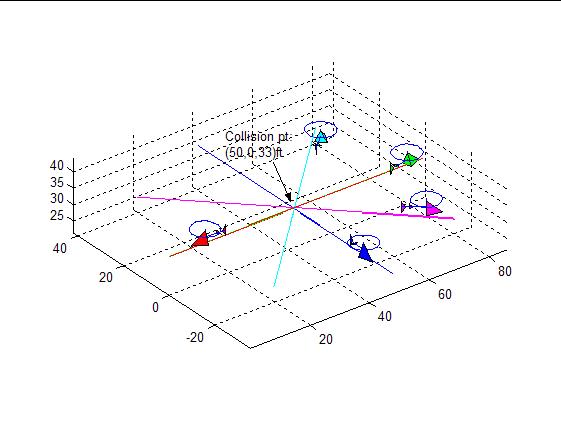
Collision Avoidance: UAVs playing chicken
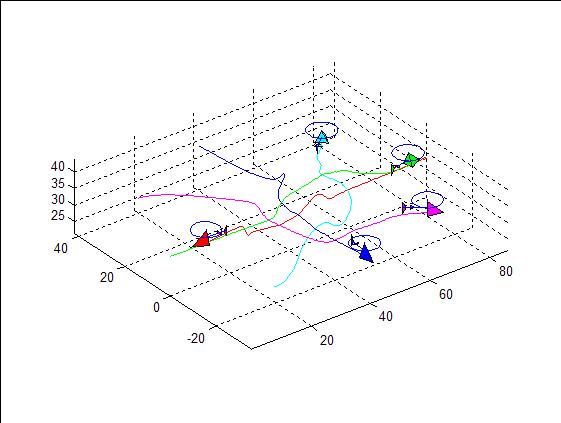
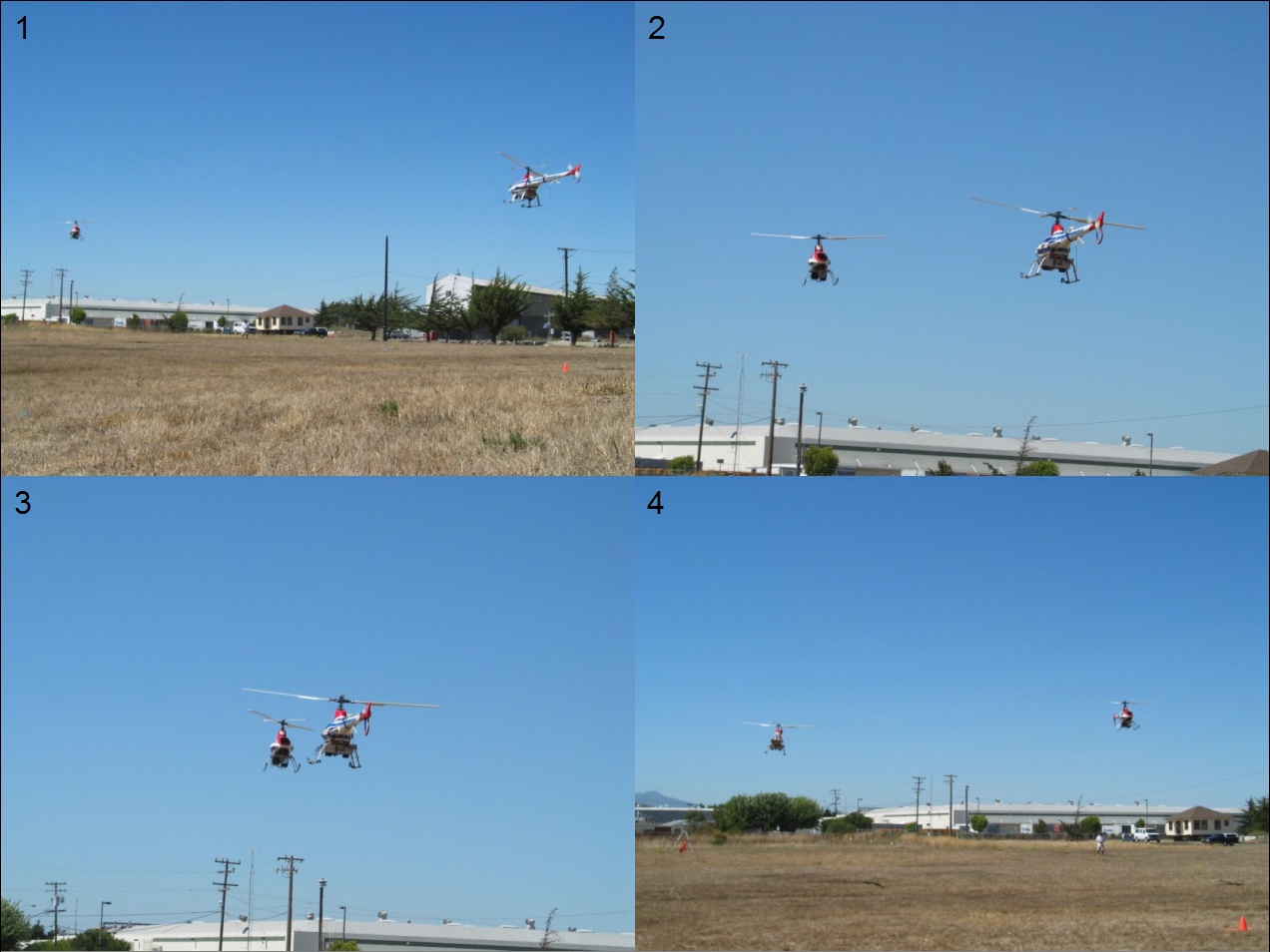
In this research, the dynamic trajectory replanning in the event of possible mid-air collision is demonstrated.
Each vehicle's flight control system is supervised with a online, fully decentralized trajectory generation based on model predictive control. Each vehicle boardcasts their current location. The proposed approach successfully finds safe paths for five helicopters in the simulation shown below. Encouraged by the simulation's outcome, we went ahead to try the idea on real Berkeley UAV platforms, each of which costs $100,000 (material only)!! So in total of $200,000 was set on a collision course. One can say we put two high-end Porches on a collision course and we hope our system can find safe paths to get these vehicles around each other without running into them. The two UAVs, Ursa Magna 1 and Magna 2, are set in an intentional head-on collision course.
The trajectory planner based on model predictive control computes the trajectories for two UAVs,
which minimize the given cost functions that penalize the proximity to other UAV and the deviation from the original course at the same time.
Upon the successful test, our daring experiment grabbed a lot of attention and Discovery Science channel was one of them. The film crew came out in May 2003 and flimed out experiment, as linked below.
Related Papers: D. H. Shim, H. J. Kim, S. Sastry, �Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments,?IEEE Conference on Decision and Control,
December 2003.
Original Flight Path
Dynamically adjusted flight path
Simulation Visualization
This research was covered by Discovery Science Channel Canada in 2003, as can be seen in the follwing link: To the Top
l무인기의 영상기반 자동착륙
Vision-based Landing
Sponsor: Dr. Alan Moshfegh, Office of Navy Research (ONR)
This project intends to deliver a technology that enables a rotorcraft-based UAV to land on a ship using its onboard vision system. It is well known that the landing of a helicopter on a ship deck is very difficult due to the relative motion between the helicopter and the ship deck on top of the underactuated nature of the helicopter control. A vision system is considered ideal due to the passive nature of sensing. In this work, a unique marker is conceived to provide the visual cue for relative attitude and distance. The helicopter uses its onboard camera and vision system to estimate the relative distance and rotation. The estimation is used to generate the landing profile.
Since the landing is always relative to the target location, which can be stationary or moving, it is more important to be able to estimate the relative distance
Related papers: O. Shakernia, C. S. Sharp, R. Vidal, Y. Ma, S. Sastry, "Multiple View Motion Estimation and Control for Landing an Unmanned Aerial Vehicle," International Conference on Robotics and Automation, 2002.
Sponsor: Army Research Office (MURI)
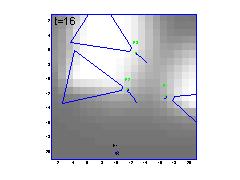
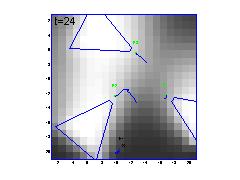
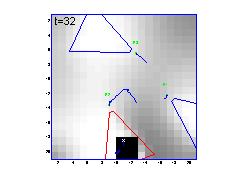
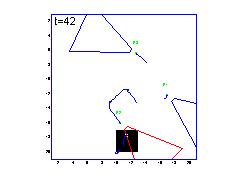
The goal of this research lies in the organization of multiple autonomous agents into organic intelligent systems with minimal supervision and cognition complexity, high-level of fault-tolerance, and maximized adaptivity to the changes in the task and the environment. The coordination of multi-agent system is architected as a set of distributed hierarchical hybrid systems, which emphasize the autonomy of each agent yet allows for coordinated team efforts. The proposed hierarchical structure transforms a highly complex large scale operation into a set of integrated and interactive modular functionals.
For the validation of the effectiveness of the proposed framework, a multi-agent probabilistic pursuit-evasion game (PEG) between teams of UAVs and UGVs is chosen. Multi-agent PEG is a promising benchmark application for cooperative multi-robot systems in which a team of agents acting as pursers attempts to capture a group of evaders within a bounded but unknown environment.
Since the full solution is often computationally infeasible in realistic situations, a number of suboptimal approaches are proposed: greedy policy and global-max policy. These proposed ideas were studied in simulations and compared in full experiments with Berkeley UAVs and UGVs.
Related papers:
R. Vidal, O. Shakernia, H. J. Kim, H. Shim, S. Sastry, "Multi-Agent Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Transactions on Robotics and Automation, vol.18, no.5, pp. 662-669, October 2002
H. J. Kim, R. Vidal, D. H. Shim, O. Shakernia, S. Sastry, "A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Conference on Decision and Control, 2001













































{kind=link}