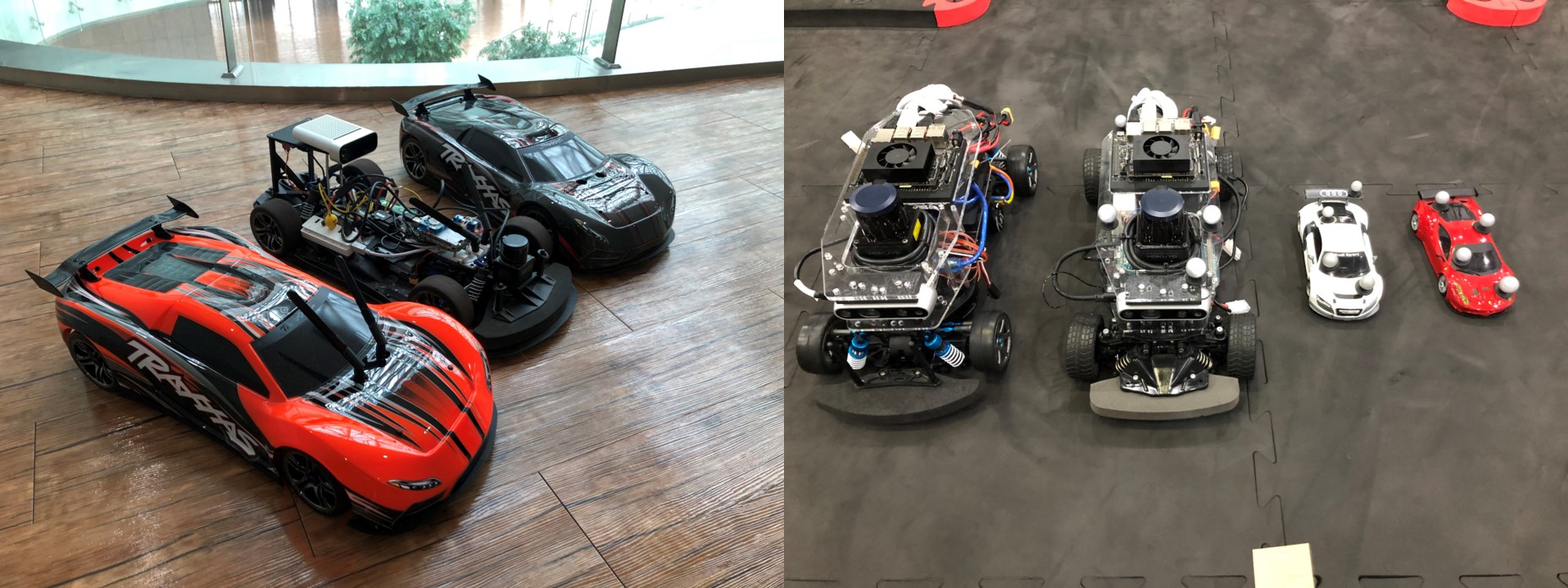
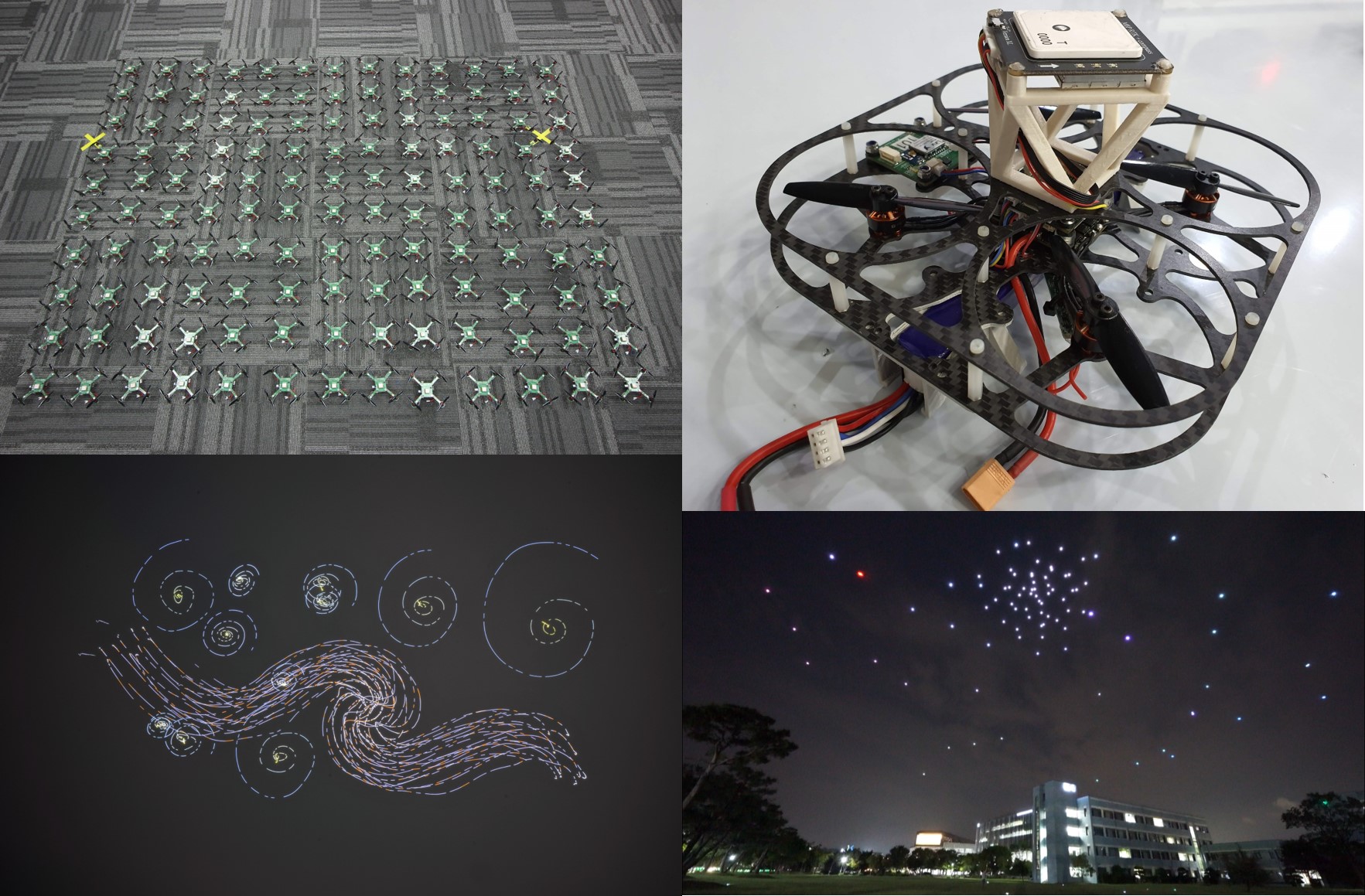
We have a variety of testbeds to perform researches


- 모바일 로봇

Indoor laboratory
- 모션 캡쳐 카메라(Optitrack)

- Nvidia DGX Station

- 서버급 컴퓨터

- 레이스 플랫폼
- 실내 비행 드론

- 다중 드론
- 3D 프린터
