I am working on the following funded projects, in addition to preliminary research topics out of my own interests.
Vision-based landing for fixed-wing UAVs (September 2007~August 2009)
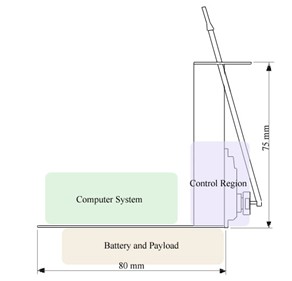
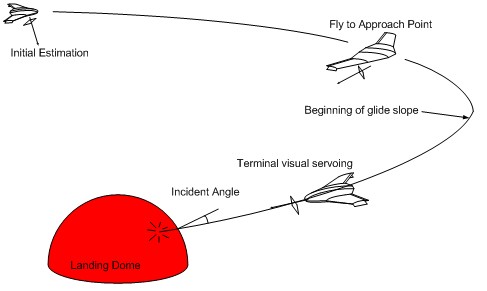
In this project, awe develop cutting-edge sensing and guidance algorithms that allow the host vehicle to land safely to a shock-absorbing net with a visual marker. Such a feature is a great plus to enable safe operations during the landing stage, during which a high percentage of accidents occur in reality. I am in charge of the hardware, airframe, and control of the aircraft.
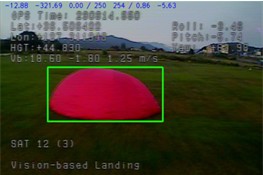
Since the beginning of the project, we have been able to come up with a slightly different idea of using an inflated airbag. This airbag not only helps to reduce the shock during the landing, but also serves as a visual marker that can be detected at a distance using a relatively simpler and more reliable algorithm. We have been able to validate our algorithm using visual feedback and successfully landed the vehicle at a very high success rate so far.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Development of Crop-dusting helicopter with 30kg payload (June 2007~May 2009)
This is a project funded by Korean Ministry of Commerce, Industry, and Energy from June 2007. The objective is to develop a helicopter that can fly autonomously to perform crop dusting task with minimum involvement of ground crews, i.e., farmers. Therefore the system has to be reliable, efficient, and easy to use. The helicopter is equipped with inertial navigation system, GPS, laser altimeter, and other sensors to ensure safe operation. The ground system is designed to provide intuitive and informative user interface to the functialities of the designed system. This work is a joint work with Oneseen Skytech.
 |
 |
 |
| Main Rotor Diameter | 3135 mm |
| Height | 1180 mm |
| Width | 770 mm |
| Powerplant | watercooled 2cycle engine 24 hp |
| Operating Time | 60 minutes |
Tail Sitter UAV
This is a joint work with Professor Seung-o Park at KAIST and Seung-jo Kim at Seoul National University, funded by Agency of Defense Development. The goal is to develop an aerial vehicle that can autonomously take off and land on its tail while flying normally like conventional aircraft for maximal efficiency through transition from vertical flight to horizontal and vice versa. The advantages are improved fuel efficiency and higher cruise speed with VTOL capability while the challenges are the difficulty of control especially during the transition, navigation algorithm, and blockage-free GPS.
 |
 |
Long-range, Long-endurance UAV powered by fuel cell
This research is for the development of unmanned aerial vehicles that are capable of long-endurance and long-distance missions using an advanced power technology currently under development in the Department of Aerospace Engineering at KAIST. Although traditional energy sources based on hydrocarbon have reasonably high energy densities, the overall efficiency is still far below an acceptable level and they are the primary cause of air pollution and greenhouse effects. On the contrary, the fuel cell generates electricity directly from the fuel without lossy combustion process. However, the conventional fuel cell technology typically uses pure hydrogen, which has to be compressed to a very high pressure or cooled to liquid state to meet the desired energy density. Such processes are prohibitively costly and hardly justifiable except for few applications such as spacecraft. Our fuel cell technology uses a liquid solution of hydrogen compound as the source of hydrogen and therefore the achievable energy density is significantly higher and the refueling and storage processes are much more convenient than conventional methods using pure hydrogen. Our proposed technology is therefore ideal for many power-demanding field systems including unmanned vehicles. Our UAV testbed is based on a blended wing-body platform, which has a very high lift-to-drag ratio, allowing a large payload weight and volume at a high efficiency. We are working on a long-rannge flight mission that can showcase the performance of our proposed UAV system... stay tuned!
 |
 |
 |
Fuel Cell-based UAV in flight |
Fuel cell installed in UAV |
Anatomy of a Sodium Borotetrahydride fuel cell |
{kind=link}
A test flight video can be found here (53MB).
GPS-guided Parafoil
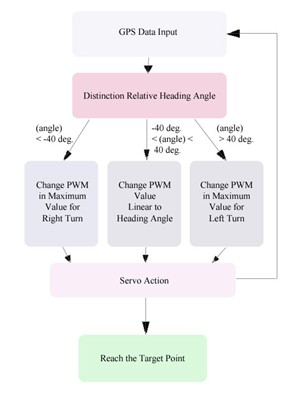
It is of high importance to guide a payload to a landing site at a greater accuracy. This task requires an active control and precision positioning system to guide the payload to reach the target point so that it can be used to deliver the supplies for soldiers in the battlefield or refugees in isolated areas. We consider a parafoil-based system because its airfoil-shaped canopy can generate a lift and steering capability instead of simply braking the descent as is the case with conventional parachutes. We have investigated various possibilities on the mechanism to effectively control the parafoil. We chose Global Positioning System (GPS) as the sole source of position measurement. We designed an algorithm to control the system only using the GPS data to guide the whole system to the target location. We validated this concept by developing flight control software in C++, integrated with a wireless communication system and a servo driver circuit. During flight tests, we used an electrically powered remote control helicopter to drop the parafoil system. A series of experiment show our parafoil control system could guide the payload to the prescribed location with a satisfactory accuracy.
Related paper:
Yeon-Deuk Jeong, Sang-Woo Moon, and Hyunchul Shim, "Development of a GPS-based Autonomous Parafoil Control System," KAIST-Kyushu University Joint Workshop, 2007 ![]()
(click the above image to watch the video version)